
ISO 14296 - ITS — Extension of map database specifications for applications of cooperative ITS
Application Area: ITS Spatial data and ITS Database technology
Publication Year, Number of Pages: Published 2016, 88 pages
Extract Creation Year: 2016
Standard Topic Group: geografická data
Standard Topic: datové soubory
Topic Description: popis aplikačního rozhraní , logický datový model
popis formátu ukládání dat
popis základní sady aplikací pro kooperativní ITS systémy
reprezentace dat v databázovém prostředí pro potřeby stanovení polohy, plánování trasy, navádění na trase a znázornění na mapě
popis logického formátu ukládání datových objektů pro aplikace kooperativních ITS systémů
UML reprezentace diagramů relační vztahy mezi úrovněmi silničních datových entit funkční a aplikační požadavky příklady podpůrných služeb řízení vozidla k dosažení cíle
Introduction
ISO 14296 je součástí norem zaměřených na oblast navigačních a lokačních systémů a souvisejících aplikací (viz kapitola Souvisící normy). Její uplatnění nalezneme zejména v oblasti navigačních a lokačních systémů, poskytování dopravních služeb, dopravním zpravodajství a systémech řízení dopravy.
Tato norma je věnována popisu základní sady aplikací pro kooperativní ITS systémy. Tyto aplikace jsou užívány ve vozidlové navigaci a v navigačních produktech nejrůznějších poskytovatelů mapových podkladů (Google, Garmin, HERE, CCS apod.).
Jedná se zejména o metody podporující dynamickou formu navigace, služby podporující řízení a navigační služby ve vozidlech a v multimodální dopravě. Z tohoto pohledu je norma vhodná i pro tvůrce či provozovatele dopravních informačních center, správce významných dopravních objektů (tunelové stavby, dálniční stavby apod.).
Application
Norma přispívá vývojářům kooperativních ITS aplikací v šíření jejich aplikačních výstupů. Tyto aplikace těží z dostupnosti normalizovaného datového modelu a datových prvků. V konečném důsledku umožňuje vývojářům zkrátit čas potřebný k uplatnění nového produktu a služby na trhu. Norma nedefinuje datový model pro individuální navigační služby mimo vozidlovou navigaci.
Pro orgány státní správy tato norma představuje popis současných technologií v oblasti poskytování aktuálních dopravních informací, jako jsou metody ITS-RSU, VICS, či RDS/TMC.
1. Scope
Norma poskytuje mapově vztažené funkční požadavky, datový model (logický datový model / organizaci logických dat) a datové prvky pro aplikace kooperativních ITS systémů, které vyžadují informace odvozené z mapových databází.
Kapitoly 2 a 3 stručně popisují souvisící normy, kterým tento dokument vyhovuje a je s nimi ve shodě.
2. Related Documents (Selection)
ISO 14825:2011 Intelligent transport systems – Geographic Data Files (GDF) – GDF5.0
ISO/IEC 19501:2005 Information technology – Open Distributed Processing – Unified Modeling Language (UML) Version 1.4.2
ISO/TS 20452:2007 Requirements and Logical Data Model for a Physical Storage Format (PSF) and an Application Program Interface (API) and Logical Data Organization for PSF used in Intelligent Transport Systems (ITS) Database Technology
3. Terms and Definitions
Kapitola obsahuje 37 termínů a definic souvisících s touto normou. Klíčové termíny jsou následující:
nastavení polohy (positioning) – kategorie aplikace, která se zabývá stanovením polohy vozidla a přizpůsobením polohy na mapu
geokódování (geocoding) – softwarový proces přiřazování adresy (ulice) nebo jiné geografické entity do mapové databáze za účelem odvození (získání) geografických souřadnic adresy nebo souvisejícího úseku ulice
přiřazení adresy (address location) – kategorie aplikace, která se zabývá úlohami vyjadřujícími reálnou polohu na zemi v rámci datové reprezentace PSF (Physical Storage Format)
propojení (junction) – entita datového modelu, která reprezentuje navigační geoprvek, kterým je buď pojmenované propojení, nebo pojmenované křížení a které přiřazuje pojmenovaný navigační geoprvek k množině linií, uzlů a míst
bod zájmu (point of interest) – cíl a/nebo místo zájmu cestujících, obvykle nekomerční povahy
4. Abbreviations
Kapitola obsahuje 10 nejrůznějších zkratek vztahujících se k předmětu normy, z nichž nejdůležitější jsou následující:
GDF- geografické datové soubory (Geographic Data Files)
LDM- lokální dynamická mapa (Local Dynamic Map)
POI- bod zájmu (Point of Interest)
ITS-RSU- inteligentní dopravní systém – jednotka zařízení na pozemní komunikaci (Intelligent Transport System - Road Side Unit)
RDS-TMC RDS rádiový datový systém (Digitální informační kanál na vlnách FM;TMC kanál pro přenos dopravních informací prostřednictvím RDS)
VICS - vozidlový informační a komunikační systém (Vehicle Information and Communication System)
6 Požadavky
Tato kapitola je členěna do dvou základních částí popisující aplikační a funkční požadavky pro aplikace kooperativních ITS systémů. Šest aplikačních kategorií (zobrazení mapy, nastavení polohy, plánování trasy, navádění na cíl, služby/POI přístup k informacím a umístění adresy) pro navigační funkcionalitu jsou definovány ve shodě s ISO/TS 20452:2007. V této normě jsou nově definovány kooperativní ITS systémy (včetně podpory řízení) a funkcí podpory multi-modální dopravy.
Mezi základní funkce této množiny patří funkce zobrazení mapy. Tato funkce poskytuje kartografická data, která mohou být využita k zobrazení mapy jakékoliv aplikace libovolně orientovaného pravoúhelníku v databázi. Data jsou složena z databázových entit podporujících rozmanitost stylů pro vykreslování mapy: kartografické geoprvky, kartografický text a symboly.
Zobrazení mapy poskytuje následující metody přístupu k datům (výčet není úplný):
- R-1. Prostřednictvím kartografických geoprvků, kartografického textu a vlastnosti symbolů, kartografického textu a symbolů pro aplikačně specifikovaný pravoúhelník, prostřednictvím hladiny a typu geoprvku;
- R-2. Prostřednictvím souřadnic pro aplikačně určený kartografický geoprvek;
- R-3. Prostřednictvím atributů kartografických geoprvků, jako jsou: typ geoprvku, název a funkční začlenění;
R-4. Prostřednictvím úplných či částečných kartografických geoprvků propojených s aplikačně specifikovanými dopravními prvky;
R-5. Prostřednictvím oblasti (velikosti), aplikačně specifikovaného rovinného geoprvku;
Mezi klíčové funkce patří funkce stanovení polohy.
Funkce stanovení polohy je užívána k určení polohy vozidla, například prostřednictvím zeměpisné šířky a délky prvku sítě pozemních komunikací a pro přiřazení na mapu. Přiřazení na mapu je metoda určování změny polohy navigačního systému v síti pozemních komunikací, založená na znalosti předcházející polohy navigačního systému a na datech o pohybu navigačního systému z externích vstupů. Tímto způsobem jsou upřesněny geo-lokalizace na pozemních komunikacích.
Pro účely stanovení polohy by měly být poskytnuty následující funkce (nejedná se o úplný výčet):
- R-25. Jednotná množina souřadnic pro aplikačně specifikovaný geoprvek Bod z tématu Pozemní komunikace a trajekty;
- R-26. Množina hran, uzlů a/nebo mezilehlých bodů pro aplikačně specifikovaný geoprvek, nebo množina propojených geoprvků z tématu Pozemní komunikace a trajekty;
- R-27. Množina topologicky propojených geoprvků z tématu Pozemní komunikace a trajekty propojených s aplikačně specifikovaným geoprvkem z tématu Pozemní komunikace a trajekty.
6.3.5 Funkce navádění na trase
Jedná se o významnou funkci, která se využívá k podrobnému generování instrukcí k následování trasy. Tyto instrukce mohou zahrnovat orientaci kompasem, vzdálenost, názvy pozemních komunikací, texty dopravních značek, orientační body a statické nebo pohyblivé obrázky. Navádění může být realizováno textem, hlasem či grafickými výstupy.
Navádění na trase poskytuje následující metody přístupu k datům (nejedná se o úplný výčet):
- R-77. Prostřednictvím relevantních geoprvků a relačních vztahů vztažených k dopravním prvkům specifikovaných aplikací, nebo množiny dopravních prvků, jako jsou: prvek křižovatky, informace na dopravních ukazatelích, okolní podmínky a orientační body v blízkosti dopravního prvku;
- R-78. Pomocí naváděcích atributů dopravního prvku specifikovaného aplikací, nebo množinou těchto prvků, které jsou: názvy pozemních komunikací, vzdálenost, směr dopravního proudu a druh pozemní komunikace;
- R-79. Pomocí vymezení, zda je aplikačně specifikované křížení částí křižovatky nebo celou křižovatkou;
7 Logický datový model
Přehledový model zahrnuje statická mapová data pro ITS služby a vztah mezi mapovými daty a dynamickými externími informacemi pro ITS systémy. Přehledový model znázorněný na obr. 1 vyjadřuje vztah mezi následujícími bloky: dopravní blok, kartografický blok, blok přiřazení adresy, blok služeb a POI, blok dynamických informací.
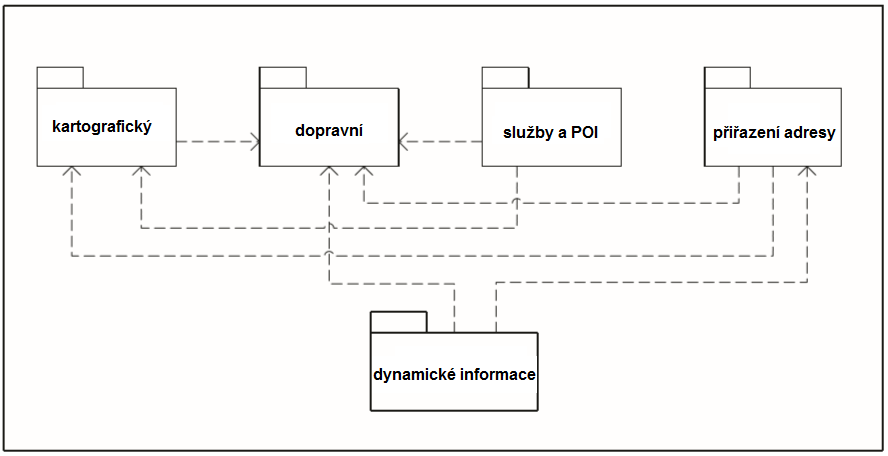
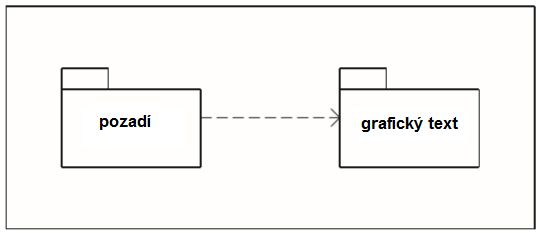
Kartografický blok
artografický blok je určen zejména pro zobrazení mapy. V kartografickém bloku je proměnlivý počet datových úrovní a relačních vztahů mezi jednotlivými úrovněmi. Kartografický blok se skládá z částí reprezentující pozadí a grafický text. Grafický text, jako například názvy mapových geoprvků, je jedním z atributů kartografických dat. Nicméně text pro kartografická data je nezávislý na datech pozadí.
Dopravní blok
Dopravní balík definuje síťová data pro kooperativními ITS služby podporované LDM, službou multi-modální podpory dopravy, vozidlovou navigací, službami veřejné dopravy, navigací pro cyklisty a chodce.
Dopravní blok se skládá z následujících pěti pod-bloků: sítě dopravních zón, sítě pozemních komunikací, sítě veřejné dopravy, sítě cyklistických cest a sítě cest pro pěší.
Blok služeb a POI
Tento blok se skládá z entity služby a entity referenčního bodu POI. Entita služby zahrnuje POI data. Definice entity služby je popsaná v ISO/TS 20452.
Blok přiřazení adresy
V ISO/TS 20452 je blok přiřazení adresy složen z místa, názvu navigačního geoprvku, úseku pozemní komunikace, křižovatky, propojení a poštovního směrovacího čísla. Nicméně blok přiřazení adresy je v této mezinárodní normě složen pouze z místa a referenčního bodu. Místo reprezentuje pojmenovanou oblast, která může být použita pro přiřazení adresy.
Blok dynamických informací
Dynamické informace, které mohou být poskytnuty externě v součinnosti s informacemi o poloze, jsou vztaženy k mapovým datům a jsou využívány k poskytování informací o dopravních podmínkách v reálném čase, například dopravní informace, informace o počasí a cestovní informace. Dynamické informace mohou být využity k rozšíření výpočtu trasy, pro podporu řízení a pro kooperativní ITS služby.
Externí dynamické informace pro ITS systémy jsou spojeny s polohou oblasti, liniovým stanovením polohy, například částí pozemní komunikace, nebo bodovým stanovením polohy, například polohou křižovatky nacházející se na pozemní komunikaci v rámci mapového podkladu. Množina dynamických informací se může skládat z entity polohy dynamické informace, dynamické dopravní informace (např. RDS-TMC, VICS), aktuální dopravní informace (např. zpoždění vlaku) a informace o počasí (např. déšť, záplava, sněžení, blizard, nebo mráz).
Příloha A (normativní) – Abstraktní testovací sada
Tato abstraktní testovací sada se týká souhrnných dat odvozených z této normy. Předmětem metody testování je posoudit shodu mezi toto normou a testovanou datovou strukturou, zda pokrývá všechny datové prvky popsané touto normou.
Příloha B (informativní) – Popis výrazových prvků UML
Tato norma využívá nově vyvinutou metodologii k vyjádření strukturovaných souvislostí, nazývanou UML. V příloze je uveden krátký popis výrazových UML prvků diagramu, které zajišťují, aby nedocházelo k nesprávnému výkladu, zaviněnému postupným vývojem UML1.4.
Příloha C (normativní) – Základní množina definic aplikací
Tato příloha normy popisuje formou tabulky základní množinu aplikací stanovenou v souladu s ETSI TC ITS TR 102638 a ETSI TC ITS TR 102863.
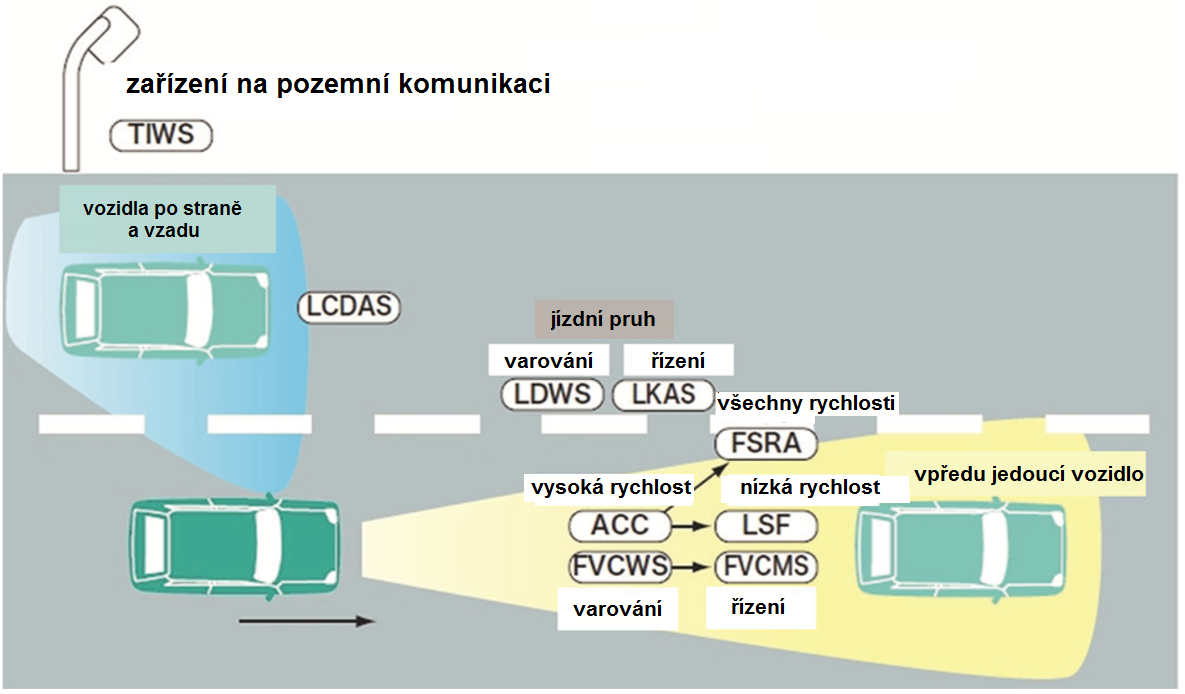
Příloha D (informativní) – Přehled příkladů služeb podpory řidiče, japonské příklady
Tato příloha, na základě zprávy ITS Japan report 2011, pomáhá seznámit čtenáře s příklady ITS systémů v Japonsku. Příloha je členěna do 4 částí: služby varování založené na informacích z pozemní komunikace, (informace o dopravních omezeních, informace o dopravním značení, dopravní informace, informace o podmínkách na povrchu pozemní komunikace, zvláštní zóny), služby varování založené na informacích o situaci v okolí vozidla (pozemní komunikace, křižovatky), ovládání vozidla, podpora eko-řizení (poskytování zpráv k eko-řízení, poskytování informací k multimodální dopravě).
Legenda:
TIWS – varovný systém překážek dopravy, FVCWS – varovný systém před srážkou s vpředu jedoucím vozidlem, LCDAS – varovný systém podpory sledování bočních překážek, ACC – adaptivní tempomat, LSF – podpůrný systém pomalé jízdy v koloně, FVCMS – vozidlový systém pro zmírnění kolize, LDWS – varovný systém před neúmyslným vyjetím z jízdního pruhu, LKAS – asistenční systém pro udržení vozidla v jízdním pruhu, FSRA – adaptivní tempomat pro všechny rychlostní režimy.
Cíl | Požadované informace o pozemní komunikaci | Řídicí prvek | Poznámka |
1. rychlostní limit | informace o rychlostních omezeních | úřad pro veřejnou bezpečnost každé prefektury |
|
2. bezpečná rychlost | zakřivení a sklon | správce pozemní komunikace |
|
informace o nebezpečné dopravní oblasti | správce pozemní komunikace, řidič | informace od řidičů mohou sloužit jako zdroj | |
informace o povrchu pozemní komunikace | správce pozemní komunikace, řidič | informace o skluzu kol detekovaného prostřednictvím systému ESP, může být rovněž informací v reálném čase | |
3. snížení kongesce | místa poklesu kongesce | správce pozemní komunikace |
|
informace o rychlostních omezeních | úřad pro veřejnou bezpečnost každé prefektury |
| |
Přínosy služby: snížení dopravních nehod z důvodu nepřiměřené rychlosti | |||
Příloha E (informativní) – Vztah mezi základní množinou aplikací a službami podpory řízení, japonský příklad
Tato příloha přináší přehled členění základní množiny aplikací v rozlišení na aplikační třídy, aplikace, případy užití a služby podpory ovládání vozidla.
Příloha F (informativní) – Případ užití služby multimodální podpora dopravy, japonský příklad
Tato příloha přináší jak grafické znázornění případu užití, tak podrobný přehled případu užití členěného na položky, popis a poznámky včetně popisu hlavních funkcí procesu multimodální podporu dopravy.