Charakteristika
OpenLR je metoda popisování polohy, umožňující popsat bodové a liniové objekty na silniční síti a skupinu segmentů silniční sítě nebo jejich částí v určené oblasti.
Popis metodou OpenLR umožňuje nalezení zamýšlených objektů u odběratele i v situaci, kdy používá odlišnou mapovou sadu.
Odkaz na polohu má formu prostorového dotazu (např. nalezení nejkratší trasy z bodu A do bodu B po silnicích určité třídy), který může být přenášen v binární nebo XML formě.
Popis řešené problematiky na vysoké úrovni
Při distribuci dopravních informací je u poloh na silniční síti zcela zásadní, aby kromě prostorového určení došlo také k přesnému přiřazení ke správnému prvku silniční sítě (silniční úsek, křižovatka atp.) Určení polohy pouhou souřadnicí WGS84 je v tomto nepostačující, protože různé mapové sady se v důsledku chyb měření mírně liší a některé souřadnice se mohou jevit v různých mapových podkladech jako příslušné k odlišným prvkům silniční sítě.
Některé (tzv. statické) metody popisování polohy řeší problém tím, že poskytovatel i odběratel užívají společné mapové sady, jejich problémem však je, že uvedený popis je nepoužitelný u odběratelů s odlišnou mapovou sadou.
Proto byly vyvinuty tzv. dynamické metody popisování polohy (např. OpenLR), které umožní interpretovat popis polohy bez ohledu na použité mapové podklady.
Definice objektů
metoda (odkazování na polohu) – sada pravidel, které umožní vytvořit systém umožňující komunikovat mezi poskytovatelem a odběratelem informace o poloze pomocí tzv. odkazu na polohu.
systém (odkazování na polohu) – soustava hardware, software a datových sad umožňující kódování nebo dekódování odkazů na polohu podle konkrétní metody odkazování na polohu.
poskytovatel (odkazu na polohu) – subjekt, který vytváří odkaz na polohu a pomocí distribučního kanálu jej poskytuje odběrateli
odběratel (odkazu na polohu) – subjekt, který přijímá z distribučního kanálu odkazy na polohu a pokouší se jej interpretovat
popisovaná realita – objekty reálného světa (např. silniční síť, nehody), u kterých je poloha významnou vlastností
zamýšlená poloha – poloha objektu, kterou chce poskytovatel popsat pomocí odkazu na polohu
interpretovaná poloha – poloha objektu, jak ji z odkazu na polohu interpretoval odběratel
odkaz na polohu – zpráva, vytvořená dle určitých pravidel, která má za účel popsat polohu objektu
mapová sada – datová sada, popisující prostorové a další charakteristiky popisované reality. V užším slova smyslu to jsou základní mapová data od konkrétního poskytovatele mapových podkladů tak, jak je používá konkrétní poskytovatel nebo odběratel odkazů na polohu.
referenční data – datová sada obsahující předkódované identifikátory a popisy význačných poloh
kodér – software, který za použití potřebných datových podkladů a dohodnutých pravidel dané metody popisování polohy vytváří odkaz na polohu zamýšlené polohy.
dekodér – software, který za použití potřebných datových podkladů a dohodnutých pravidel dané metody popisování polohy interpretuje odkaz na polohu.
distribuční kanál – prostředí, umožňující přenos zprávy s odkazem na polohu mezi poskytovatelem a odběratelem odkazu na polohu
zkrácení – (offset) délka zkrácení nalezeného liniového objektu na začátku a/nebo na konci o určitou délku
FOW – (form of way) atribut pozemní komunikace popisující její stavební uspořádání.
FRC – (functional road class) atribut pozemní komunikace popisující její třídu.
Architektura popisovaného řešení
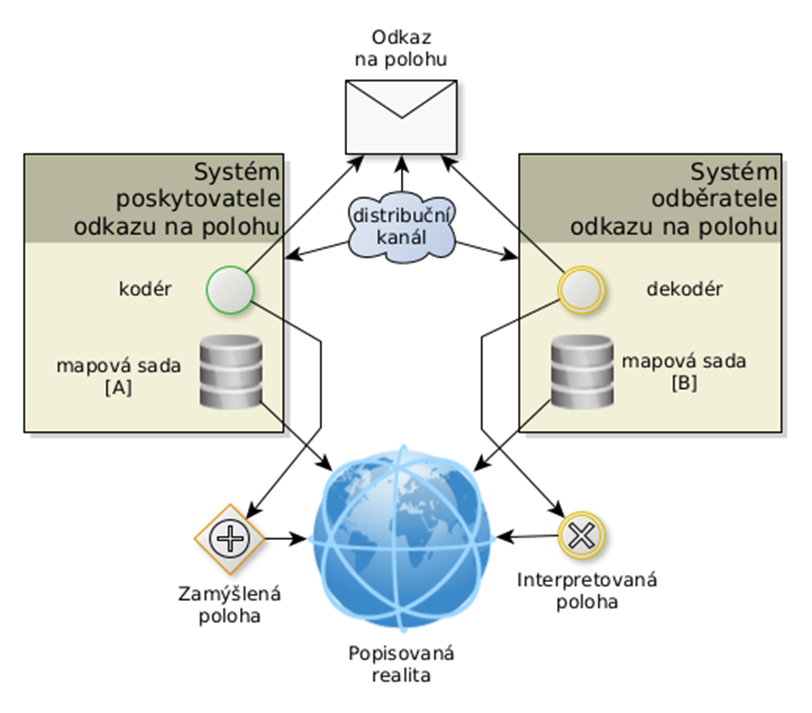
Obr. 1 - Architektura pro odkazování na polohu dle OpenLR
Prvky systému odkazování na polohu pomocí OpenLR
Obrázek 1 popisuje komponenty, které jsou využity při implementaci tvorby a interpretaci odkazů na polohu dle OpenLR.
Šipky jsou ve směru popisovaných vztahů ve směru čtení.
Zamýšlená i interpretovaná poloha se vyskytují jako součást popisované reality.
Mapová sada [A] i [B] popisují popisovanou realitu ve shodné lokalitě a při popisu používají obdobný model popisu. Pozn.: mapové sady mohou pocházet od odlišných tvůrců map nebo být v odlišných verzích vydání.
Kodér dokáže pro interní reprezentaci zamýšlené polohy vytvořit odkaz na polohu dle OpenLR, dekodér dokáže z odkazu na polohu dle OpenLR vytvořit interní reprezentaci interpretované polohy.
Odkaz na polohu má formu prostorového dotazu a může být vyjádřen v binární nebo XML formě.
Distribuční kanál umožňuje přenášet zprávy s odkazem na polohu mezi poskytovatelem a odběratelem.
Binární a XML reprezentace odkazu na polohu
Metoda OpenLR definuje dvě formy reprezentace – binární a XML. Binární forma dovoluje vyjádřit naprostou většinu poloh natolik krátkým datovým objektem, že se snadno využije i při distribuci informací do mobilních aplikací. XML forma se zase používá tam, kde není nutno řešit omezenou konektivitu a je důležitější popsat informace způsobem, který se dá dobře pochopit a dále zpracovat.
Přehled funkcí popisovaného řešení
Příklad prostorového dotazu
Metoda OpenLR staví na principu prostorového dotazu. Poskytovatel se pokouší vytvořit takový dotaz, který má při použití na mapové sadě odběratele vysokou pravděpodobnost, že najde objekty, které popisují shodnou realitu.
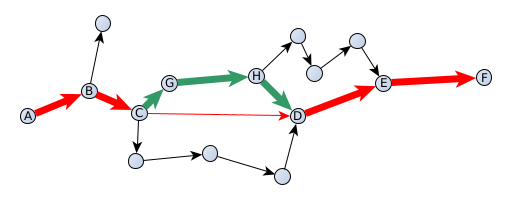
Obrázek 2: Příklad dotazu pro liniovou polohu na silniční síti
Obrázek 2 popisuje (tučně vyznačenou) polohu na silniční síti, která vede z uzlu A přes uzly B, C, G, H, D, E a končí v uzlu B.
Prostorový dotaz (s určitou mírou zjednodušení) má následující znění:
Najdi nejkratší možnou trasu po silniční síti z uzlu A do uzlu F, která v uzlu C odbočuje silnicí výjezdem s azimutem (C->G).
Uzly nejsou v dotazu označeny písmeny, ale souřadnicemi. V cílových mapových podkladech se odpovídající uzly hledají nejen podle souřadnic, ale také podle odpovídajících atributů FOW a FRC souvisejících silničních segmentů.
Azimut C->G je specifikován hodnotou, která je patrná v místě výjezdu a není nutně azimutem směřujícím přesně do uzlu G.
Díky požadavku na odbočení v uzlu C nevede trasa z A do F nejkratší (červenou) trasou, ale odbočuje zeleně vyznačenými segmenty na G a H jak je zamýšleno.
Skutečný dotaz může mít celou řadu dalších parametrů a konstrukcí, které zde nejsou z důvodu jednoduchosti popsány.
Pravidla metody odkazování na polohu
Je nutno, aby obě mapové sady popisovaly silniční síť a měly potřebné atributy, zejména se jedná o atributy FRC a FOW.
Prostorový dotaz je (pro popis liniové polohy na silniční síti) formulován jako trasa z jedné křižovatky na jinou křižovatku a tuto trasu lze na počátku a konci zkrátit o definované délky.
V dotazu se mj. uvádí nejnižší třída komunikace, po které má trasa vést, tím se předchází zkratkám po málo významných komunikacích. K upřesnění trasy lze do popisu přidat navigační body, tedy body, kterými musí trasa projet, případně v nich odbočit v určeném směru.
Tvorba a interpretace odkazu
Poskytovatel odkazu na polohu vytváří ve vlastních mapách dotaz, který vybírá zamýšlené objekty silniční sítě.
Odběratel ve svých mapách dotaz provede a měl by najít objekty silniční sítě, reprezentující shodnou realitu.
Pozn.: existují volně dostupné knihovny kódu, které tvorbu dotazu i jeho interpretaci provádí.
Rozpoznání neexistující polohy
V situaci, kdy odběratel nemá ve vlastních mapových datech nějakou komunikaci se považuje za správné rozpoznat, že popisovaná poloha není interpretovatelná. Je chybou najít nějakou podobnou komunikaci v okolí, např. obslužnou komunikaci nižší třídy.
Aplikovatelnost
Metoda OpenLR umí popisovat bodové a liniové objekty na silniční síti a skupinu takových objektů nebo jejich částí v určité oblasti.
OpenLR je jedna z nejpopulárnějších dynamických metod odkazování na polohu. Důvody jsou ty, že je ve srovnání se staršími metodami (např. AGORA-C) jednodušší, stojí za ní výrazný hráč – firma TomTom, a především to, že není zatížena licenčními poplatky, protože je k použití vydána pod licencí, která umožňuje otevřené a bezplatné použití i v komerčních aplikacích.
Metoda má ve své výchozí verzi dvě formy reprezentace – binární a XML. Binární forma dovoluje vyjádřit naprostou většinu poloh natolik krátkým datovým objektem, že se snadno využije i při distribuci informací do mobilních aplikací. XML forma se zase používá tam, kde není nutno řešit omezenou konektivitu a je důležitější popsat informace způsobem, který se dá dobře pochopit a dále zpracovat.
Metoda si postupně našla využití jako jedna z dostupných metod popisu polohy např. v oblasti DATEX II.
Z hlediska přesnosti je u dynamických metod vždy zapotřebí počítat s rizikem, že se nějaký odkaz na polohu nepodaří interpretovat správně. Toto riziko je na hlavních tazích (typicky tam, kde je pokrytí lokačními tabulkami ALERT-C) velmi malé. Protože ale chybu nelze vyloučit, je nutno zvážit rizika a dopady případných chyb v konkrétní aplikaci.
Zajímavou výhodou dynamických metod je, že dokáží přenést odkaz nejen mezi odlišnými mapovými podklady, ale umožňují zachování dobré použitelnosti i v čase, proto se (za předpokladu existence stejné silniční sítě) dají srovnávat i události v průběhu času.
Výrazným přínosem metody OpenLR je, že zásadně zvyšuje použitelnost poskytovaných informací (s odkazy na polohu) u široké škály odběratelů a tím zásadně zvyšuje užitnou hodnotu poskytovaných informací.
Odkazy a souvisící normy
Klíčovým zdrojem pro implementaci OpenLR jsou stránky http://www.openlr.org/, na kterých se nachází jak dokumentace, tak vzorová data, tak odkazy na knihovny, které umožňují metodu používat.
Metoda OpenLR se užívá v řadě dalších aplikací, které popisují, jak se v jejich kontextu odkazy formou OpenLR reprezentují. Příkladem může být DATEX II EN
Umístění v hierarchii témat
Nadskupina: Metody odkazování na polohu
