
Adaptivní tempomat (Adaptive Cruise Control - ACC) je systém, který automaticky udržuje zvolenou rychlost vozidla a zároveň ji dynamicky přizpůsobuje před jedoucímu vozidlu, tak aby udržel požadovaný a zároveň bezpečný odstup mezi těmito vozidly.
Adaptivní tempomat
Aplikační oblast: Varovné a kontrolní systémy ve vozidle a na pozemní komunikaci, Systém ve vozidle
Charakteristika
Popis řešené problematiky na vysoké úrovni
Adaptivní tempomat (Adaptive Cruise Control - ACC) je systém, který automaticky udržuje zvolenou rychlost vozidla a zároveň ji dynamicky přizpůsobuje vpředu jedoucímu vozidlu, tak aby udržel požadovaný a bezpečný odstup mezi vozidly. Adaptivní tempomat je jedním z typických pokročilých vozidlových asistentů (ADAS), které snižují zátěž řidiče při řízení, ale vyžadují stálé monitorování. Primárním účelem ACC je snížit únavu při dlouhé cestě, přičemž na rozdíl od běžného tempomatu není nutné brzdit před vozidly vpředu a opakovaně znovu aktivovat systém. Systém ACC bývá často kombinován s dalšími systémy podpory pro kombinovanou bezpečnost vozidel, např. systémem autonomního nouzového brzdění. Součástí systému by mělo být vhodné uživatelské rozhraní, aby mohl být řidič vhodným způsobem varován o mezích fungování systému.
Definice objektů
Tempomat - Curuise Control je jedno z prvních zařízení, které ulehčuje řidičům práci zejména na dlouhých a jednotvárných trasách tím, že dokáže bez řidičova zásahu udržovat přednastavenou rychlost. První tempomaty velmi populární v USA a byly mechanické.
Radar je zařízení, které za pomoci vysílání elektromagnetických vln a snímání jejich navrácených odrazů detekuje vzdálenost objektů pře sebou.
LIDAR Light Detection And Ranging je obdoba radaru, která využívá namísto ultrazvuku laserový paprsek. Touto metodou se získává komplexnější 3D model okolí vozidla.
FSRA - Full speed range adaptive cruise control je adaptivní tempomat s plným rozsahem rychlosti, obvykle vyžaduje soustavu radarů, které pokrývají prostorové úhly pro různé rychlostní intervaly.
LSRA - Limited Speed Range Adaptive Cruise je adaptivní tempomat s omezeným rozsahem rychlosti (např. pomalé popojíždění v kolonách, nebo naopak horní omezení rychlosti jízdy po dálnici).
Architektura popisovaného řešení
Systém se skládá ze senzorů (radar/lidar/laser/kamera) k měření vzdálenosti a relativní rychlosti svého a vpředu jedoucího vozidla, strategie řídící logiky propojené s ovládáním motoru a brzd (která musí respektovat vlastnosti a aktuální stav vozidla) a ovládacího rozhraní řidiče. Reálné systémy často využívají alespoň dva druhy měřicích radarů – jeden pro dlouhé a druhý pro krátké vzdálenosti. Tím je zajištěna větší přesnost měření a detekce v různých dopravních situacích.
Ovládání ACC se provádí pomocí prvku, typicky páčky pod volantem, s následujícími požadavky:
- zvolená rychlost,
- zvolený odstup od vozidla vpředu,
- vypnutí/zapnutí systému,
- strategie řízení (nepovinné) - další parametry jako je nastavení charakteru řízení jízdy (sportovní, eko atd.).
Zpětná vazba vozidla o nastavení, funkci a stavu systému probíhá obvykle pomocí grafiky na displeji v přístrojovém štítu, či jiném vhodném zobrazovači. U moderních systémů je uživatelské rozhraní obvykle integrováno do komplexnějších rozraní, protože je (stejně jako funkce ACC samotná) zapouzdřeno nebo propojeno s dalšími asistenčními systémy a musí s nimi pracovat v naprosté shodě. Schéma architektury je na obrázku 1.
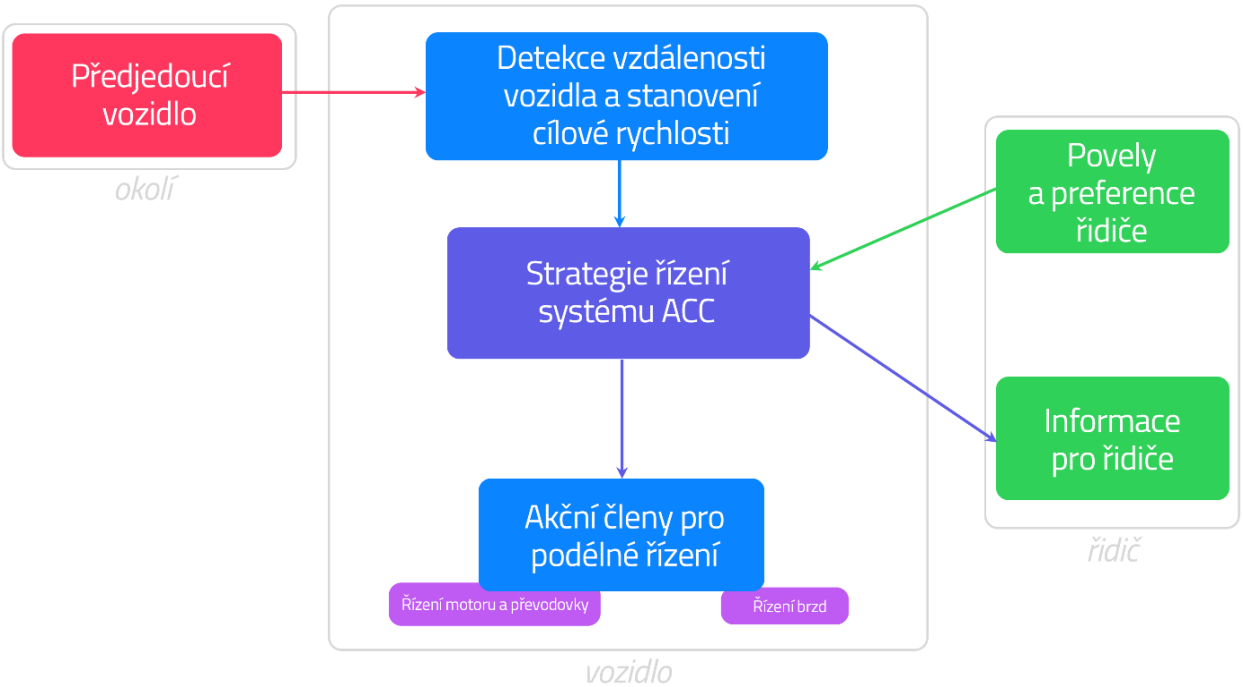
Obrázek 6: Schéma architektury pro adaptivní tempomat (ACC)
Přehled funkcí popisovaného řešení
Řidič nastavuje požadovanou rychlost, stejně jako u konvenčního tempomatu. Kromě toho může nastavit požadovaný rozestup od vozidla jedoucího vpředu. Po aktivaci ACC řídící logika udržuje zvolenou rychlost, a pokud radar rozpozná blížící se vozidlo vpředu, postupně vozidlo autonomně sníží rychlost na rychlost vozidla vpředu snížením výkonu motoru, popř. použitím brzd. Dále udržuje zvolený odstup (časový) od vozidla vpředu, dokud vozidlo nezmění jízdní pruh nebo rychlost vozidla vpředu nepřekročí rychlost nastavenou na ACC. Funkce typické implementace je znázorněna pomocí stavového diagramu na obrázku 2.
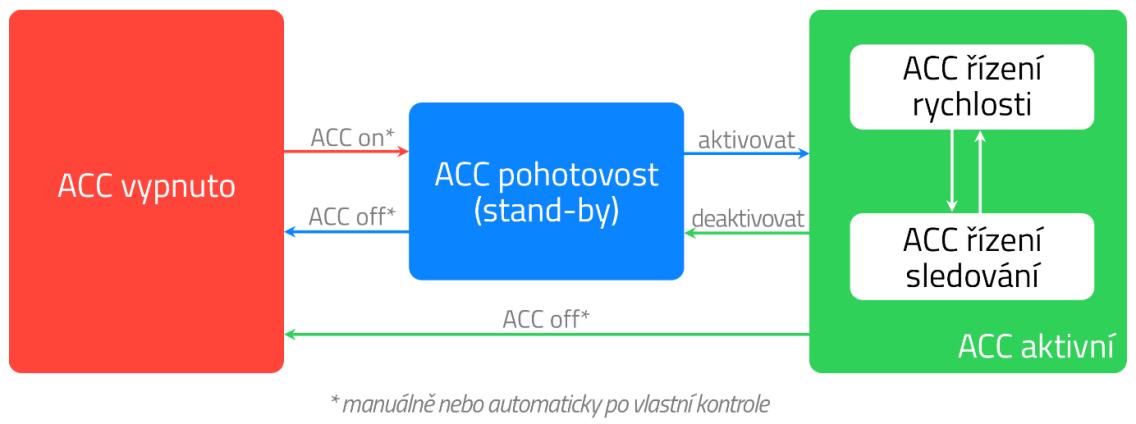
Obrázek 7: Stavový diagram reálné funkce základního ACC
Detekce (měření) vzdálenosti a relativní rychlosti vozidel vpředu je typicky prováděno radarem (či souborem radarů). Ten může být u některých vozidel doplněn dalšími snímači, např. videodetekcí překážky či lidarem. Uživatelské rozraní s nastavením a informacemi o stavu systému je na obrázku 3.
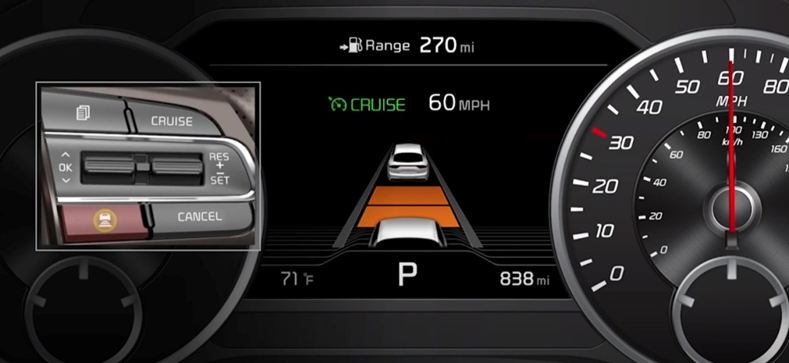
Obrázek 3. Uživatelské rozraní ACC s nastavením odstupu a strategie řízení jízdy
Adaptivní tempomat má lepší potenciál využití ve vozidlech s automatickou převodovkou, protože může využívat větší rozsah rychlosti mezi zvolenou a aktuálně nastavenou (FSRA). V praxi je systém často využíván v kombinaci se systémem udržování vozidla v jízdním pruhu (Lane Assist), který autonomně řídí směr vozidla v jízdním pruhu (ačkoli vyžaduje stálou kontrolu řidiče, typicky vymáhanou detekcí ruky na volantu).
Různé úrovně ACC jsou schopny funkce v různých poloměrech směrových oblouků (úrovně I-IV). Čím menší poloměr oblouku, tím komplikovanější je detekce vozidla vpředu a tím vyšší je udávaná úroveň ACC (Tabulka 1).
Tabulka 1: Úrovně ACC
Úrovňové třídy | Poloměry zatáček |
I | bez udané hodnoty |
II | ≥500m |
III | ≥250m |
IV | ≥125m |
Aplikovatelnost
Adaptivní tempomat spojuje konvenční tempomat s moderními elektronickými systémy pro zvýšení aktivní bezpečnosti. Systémy ACC jsou realizovány jako adaptivní tempomaty s plným rozsahem rychlosti (FSRA) nebo adaptivní tempomaty s omezeným rozsahem rychlosti (LSRA). Systémy LSRA se dále rozlišují na dva typy, vyžadující manuální nebo automatickou převodovku. Systém ACC může být rozšířen o další funkce, jako je například varování před překážkami vpředu. U systémů typu FSRA se systém pokusí zastavit za již jedoucím vozidlem v rámci svých omezených zpomalovacích schopností a bude schopen se znovu rozjet poté, co řidič zadá do systému požadavek na pokračování v jízdě z klidu. Rozšířením adaptivního tempomatu je prediktivní tempomat, který pracuje s daty z navigačního systému a automaticky s předstihem upravuje rychlost např. před směrovými oblouky nebo dle aktuálně daných rychlostních limitů.
Odkazy a souvisící normy
ISO 22179 – ITS – Systémy adaptivního udržování rychlosti jízdy při jednotlivých jízdních režimech – funkční požadavky a zkušební postupy
ISO 15622 Silniční vozidla — Funkční požadavky na adaptivní regulaci rychlosti jízdy. Zkušební metody pro posuzování
ISO 2575 Silniční vozidla — Symboly pro ovládací prvky, indikátory a kontrolní ukazatele
ECE - Předpis č. 13-H Jednotné zásady schvalování osobních vozidel s ohledem na brzdné systémy
Umístění v hierarchii témat
Heslo spadá do skupiny asistenčních systémů, kterými se vybavují moderní vozidla. Jedná se o jeden z historicky prvních, který byl široce nasazován do vozidel vyšších tříd.
Nadskupina: Silniční vozidla
Nadskupina: Asistenční systémy řidiče.
Podskupiny: Symboly pro ovládací prvky, indikátory a kontrolní ukazatele, funkční požadavky, testovací procedury.