
Heslo představuje širokou kategorii technologií, které mají za cíl snížit kognitivní a fyzickou zátěž řidiče, oddálit vznik a projevy únavy, celkově zvýšit uživatelský i jízdní komfort, a především bezpečnost jízdy. Pokročilé asistenční systémy zároveň představují předstupeň před plně automatizovaným řízením a autonomní jízdou.
Asistenční systémy
Aplikační oblast: Varovné a kontrolní systémy ve vozidle a na pozemní komunikaci
Charakteristika
Popis řešené problematiky na vysoké úrovni
Pokročilé asistenční systémy ve vozidle zaznamenaly za poslední roky významný vzestup. Do popředí se dostávají nejen systémy zaměřené na zvýšení aktivní a pasivní bezpečnosti účastníků silničního provozu (systémy pro zvýšení jízdní stability, detekce překážek, automatizované brzdění atd.), ale i systémy určené pro zvýšení komfortu cestujících, či systémy podpory snížení spotřeby a ekologické zátěže pružným nastavením parametrů jízdy. Asistenční systémy jsou také technologickým předpokladem pro vývoj a implementaci automatizovaného řízení. Postupný a předpokládaný proces automatizace vozidla a s ním spojený vývoj inteligentních asistenčních systémů na úrovni funkce a senzoriky je zobrazený na obrázku 1.
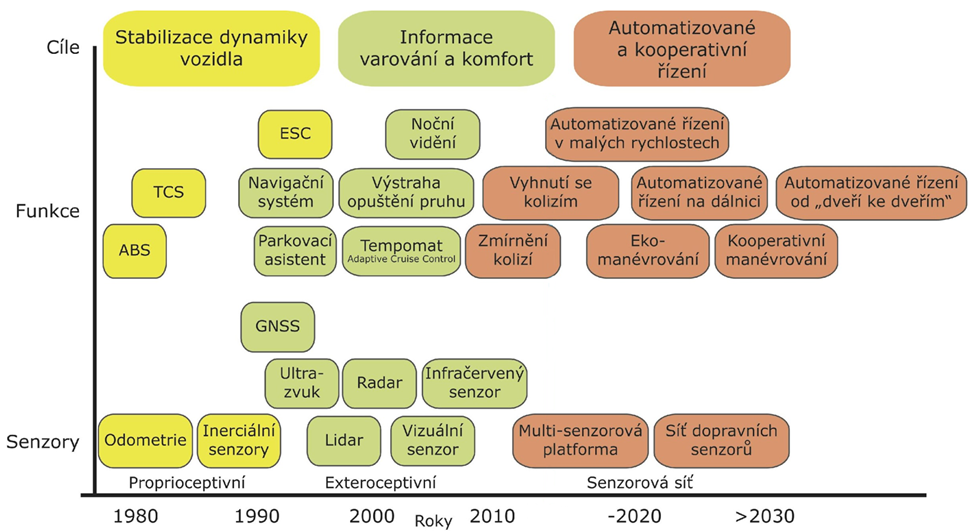
Obrázek 1: Vývoj vozidlových systémů směrem k autonomnímu a kooperativnímu řízení
Asistenční systémy jsou obvykle zařazovány do moderních vozidel z následujících důvodů:
- zvýšení bezpečnosti provozu vozidla,
- snížení zátěže řidiče,
- zvýšení bezpečnosti v situacích, kdy je řidičův zásah z principu pomalejší nebo méně adekvátní/přesný než zásah asistenčního systému, či není možné přirozenou senzorikou řidiče získat dostatečné informace pro adekvátní zásah,
- zajištění adekvátní reakce v případě, kdy řidič z jakéhokoliv důvodu prokazatelně nereaguje v čase dostačujícím k úspěšnému řešení situace,
- zvýšení komfortu při používání vozidla,
- nahrazení úkonů, které jsou pro některé řidiče obtížné nebo nemožné.
Definice objektů
Aktivní zásahy řízení (active control) - funkce, které zajišťují aktivaci (případně i ovládání) nějakého z řídicích systémů (např. použití brzd) bez aktivního ovládání řidičem.
ABS (Anti-lock Braking System) - systém zabraňující zablokování odvalování kola při brždění.
ADAS – Pokročilé asistenční systémy (Advanced Driver-Assistance systems) – jsou obecně systémy, které disponují pokročilou senzorikou, inteligentním vyhodnocováním vstupů a obvykle také – v případě nutnosti – možností aktivního zásahu.
ESP – Elektronický stabilizační systém jízdy (Electronic Stability Program) – systém, který dokáže podpořit vedení vozidla ve směru zamýšleném řidičem tím, že na základě dat ze senzorů zrychlení a natáčení vhodným způsobem přibržďuje jednotlivá kola a upravuje výkon motoru.
Radar je zařízení, které za pomoci vysílání elektromagnetických vln a snímání jejich navrácených odrazů detekuje vzdálenost objektů pře sebou.
LIDAR (Light Detection And Ranging) je obdoba radaru, která využívá namísto ultrazvuku laserový paprsek. Touto metodou se získává komplexnější 3D model okolí vozidla.
Architektura popisovaného řešení
Obecný asistenční systém potřebuje k přesnému určení, vyhodnocení situace a následné provedení akce celou řadu integrovaných senzorů a dalších vstupů jakými jsou:
- senzory uvnitř vozidla (či jeho prvků, např. motoru, brzd, akcelerometry atd.),
- senzory měřící vně vozidla,
- další data, která jsou díky komunikačním možnostem aktuálního vozidla dostupná,
- vstupy od řidiče či posádky (snímané senzory, či úmyslné zásahy nebo přímo ovládání)
- vnitřní modely, které zajišťují predikci chování a reakce na prováděné zásahy,
- vnitřní parametry systému.
Fúze dat ze senzorů a dalších vstupů v kombinaci s pokročilými algoritmy, výpočetním výkonem, konektivitou a vysoko kapacitním přenosem dat tvoří základní požadavky na moderní asistenční systémy. Schéma obecné architektury asistenčního systému je zobrazeno na obrázku 2.
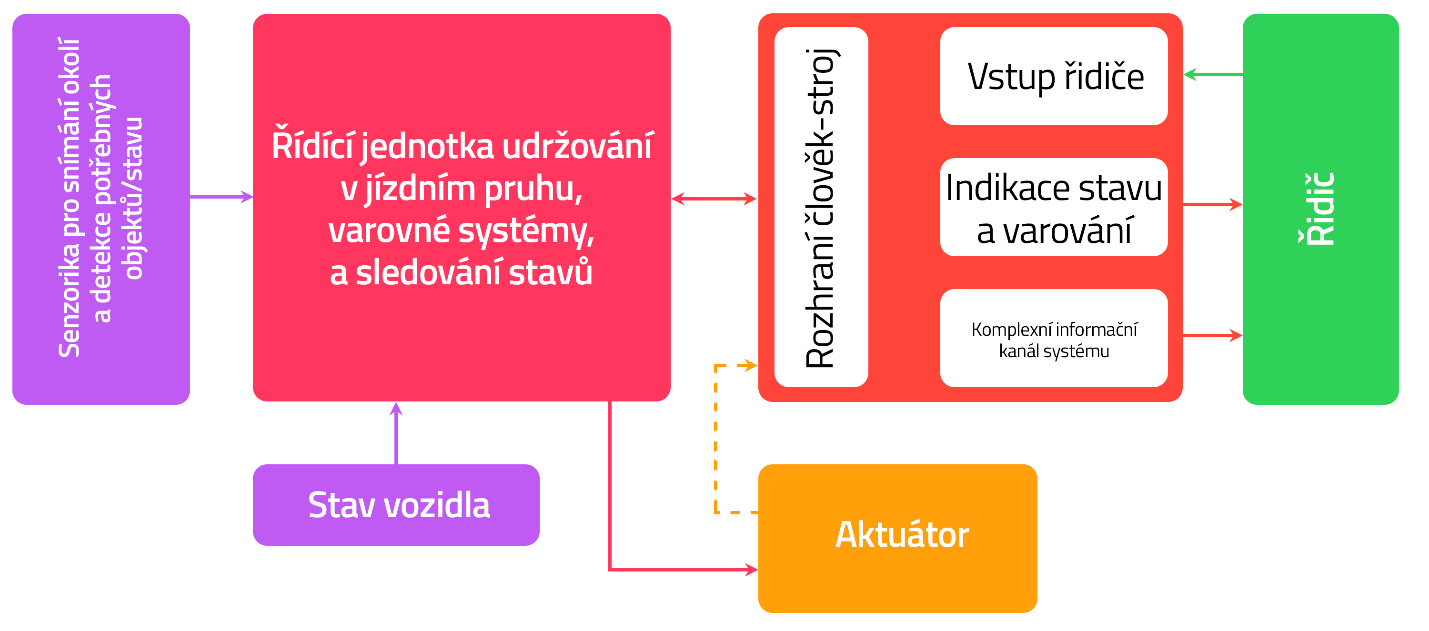
Obrázek 2: Schéma architektury obecného asistenčního systému ve vozidle
Systém na základě vyhodnocených dat poskytuje řidiči informaci (kterou sám nedokáže nebo nestíhá vlastními smysly sám vyhodnotit) nebo provádí manévr za pomoci zásahu do řídicích či pohonných systémů vozidla. Zde může jít i o systémy kontroly komfortu či multimediální systémy, je-li to v konkrétním případě vhodné.
Přehled funkcí popisovaného řešení
Na základě funkce je možné rozdělit asistenční systémy do tří skupin, a to na informační systémy (zvyšují povědomí řidiče o okolní situaci), varovné systémy (upozorňují řidiče na potenciální nebezpečí) a intervenující systémy (řidiče nejen varují, ale mohou do řízení i aktivně zasáhnout). S rozvojem nových technologií jsou moderní automobily vybavovány vedle standartních asistenčních systémů (ABS, ESP apod.) také novými tzv. pokročilými asistenčními systémy (ADAS).
Takové systémy tedy musí disponovat vhodnými rozhraními pro vstupy i výstupy, které jsou závislé na typu, pokročilosti a funkci daného systému. Ty komunikují v reálném čase (při řešení nastalé situace), nebo dle potřeby (při nastavování vnitřních parametrů, kontinuálním získávání dat apod.). Obvykle disponují podsystémy zajišťující následující:
- vstupy ze senzoriky,
- vstupy z komunikačních systémů,
- výstupy do řízených systémů (nebo přímo aktuátory),
- výstupy do komunikačních systémů,
- interakci s řidičem skrze uživatelská rozhraní (komunikace může a nemusí být oboustranná).
Následující ilustrace (obrázek 2) ukazuje sadu typických asistenčních systémů, kterými v současnosti disponují nejen vozy vyšších kategorií, ale postupně i kategorií středních i nižších. Jednotlivé funkce jsou zde ilustrovány společně s oblastí v okolí vozidla, kterou musí ke své správné funkci sledovat a vyhodnocovat a kterou pokrývají vhodnými senzory. Volba senzorů a jejich počet má vliv na definované provozní podmínky a s tím spojená omezení, ale současně i na cenu.
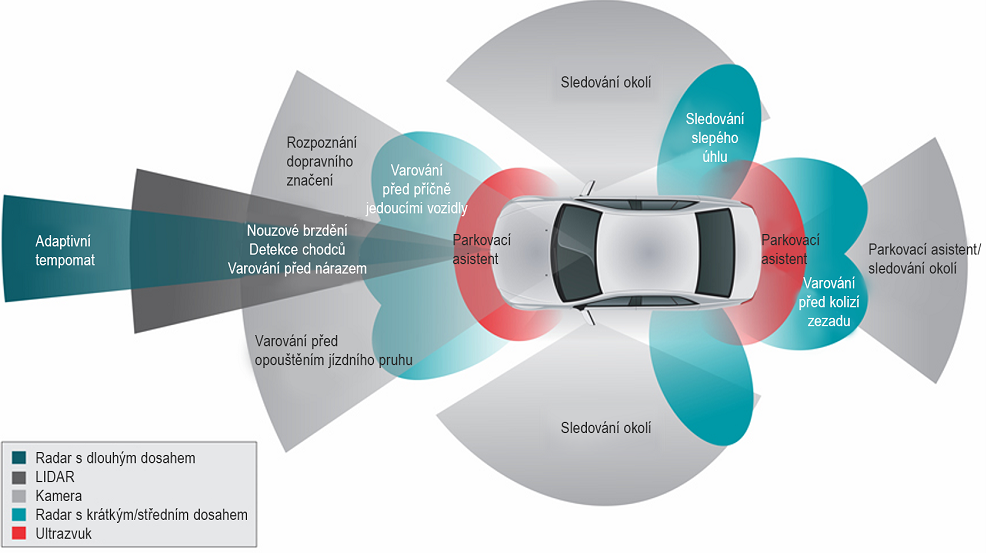
Obrázek 2: Ilustrace senzoriky pro různé ADAS (ve spojení s jejich funkcí)
Aplikovatelnost
Problematika asistenčních systémů řidiče a řízení patří v současnosti, vedle elektrizace a hybridizace pohonu, mezi nejaktuálnější téma v oblasti návrhu a výroby silniční vozidel. Je to dáno mj. tím, že řada těchto systémů je postupně vyžadována legislativou, a to jak z důvodu tlaku na zvyšování bezpečnosti, tak i např. efektivnosti a ekologičnosti přepravy jako celku. Dalším velmi aktuálním důvodem zájmu o rozvoj těchto systémů je fakt, že velmi pokročilé a komplexní asistenční systémy ve své podstatě musí splňovat obdobné požadavky jako systémy automatické jízdy.
Samostatná pracovní skupina ISO (součást TC204) se intenzivně zabývá právě tvorbou standardů, které primárně řeší různé asistenční systémy vozidel, a to zejména z pohledu návrhu jejich funkcí a podmínek ověřování jejich korektní a bezpečné práce.
Odkazy a souvisící normy
ISO 15622 – Inteligentní dopravní systémy (ITS) – Systémy adaptivního tempomatu (ACC) – Funkční požadavky a zkušební postupy
ISO 17386 – Inteligentní dopravní systémy - Pomoc při manévrování při nízkých rychlostech - Funkční požadavky a zkušební postupy
ISO 18682 – Inteligentní dopravní systémy (ITS) – Systémy detekce vnějšího nebezpečí a upozornění řidiče – Základní požadavky
ISO TR 20545 – Inteligentní dopravní systémy – Varovné a řídicí systémy vozidla / pozemní komunikace – Zpráva o standardizaci automatizovaných řídicích systémů vozidel (RoVAS) / Asistenční systémy nad rámec kontroly řidičem
ISO 22179 – ITS – Systémy adaptivního udržování rychlosti jízdy při jednotlivých jízdních režimech – Funkční požadavky a zkušební postupy
ISO 22840 – ITS – Podpůrné systémy sledování překážky při nižších a středních rychlostech při couvání
Umístění v hierarchii témat
Nadskupiny: Silniční vozidla, Rozhraní člověk-stroj.
Podskupiny: Symboly pro ovládací prvky, indikátory a kontrolní ukazatele, Ergonomické aspekty dopravně informačních a řídicích systémů, Varovné a řídicí systémy vozidla.