
Vozidla mohou být vybavena různými systémy, které mohou řidiči asistovat s jízdou (zvyšovat komfort nebo bezpečnost), mohou být schopna plně automatizované jízdy za určitých podmínek, v nejvyspělejší variantě mohou teoreticky dosahovat parametrů dostatečných pro autonomní jízdu – bez zásahů řidiče. Za jako jeden z prvních významných mezinárodně uznávaných normativních dokumentů je považován standard SAE J3016, který definoval terminologii a požadavky na funkce jednotlivých úrovní asistenčních/autonomních systémů od tzv. nulové varianty až po zcela autonomní vozidla.
Automatizovaná silniční vozidla – úrovně automatizace řízení
Aplikační oblast: Varovné a kontrolní systémy ve vozidle a na pozemní komunikaci
Charakteristika
Popis řešené problematiky na vysoké úrovni
Standard SAE J3016 definuje terminologii a požadavky na funkce jednotlivých úrovní asistenčních/autonomních systémů od tzv. nulové varianty až po zcela autonomní vozidla. Zejména s následujícími aspekty:
- Definice roli řidiče v závislosti na aktivovaných asistenčních systémech a systémech automatizace.
- Návrh a rozsah nutných legislativních, regulatorních a standardizačních požadavků.
- Poskytnutí rámce pro automatizaci řízení a technické požadavky na ni.
- Zjednodušení a usnadnění komunikace problematiky autonomního řízení.
- Návrh rámce pro budoucí normalizaci dílčích systémů automatizovaných/autonomních vozidel.
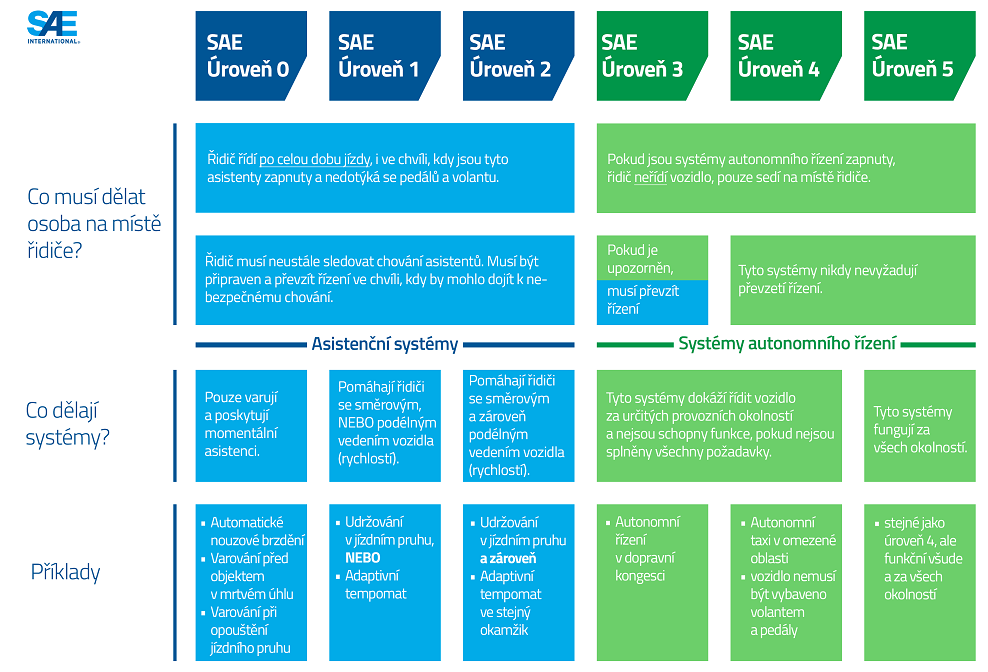
Asistenty řízení/systémy pro autonomní jízdu jsou klasifikovány na šestistupňové škále dle pokročilosti a schopností:
- Úroveň 0: žádná automatizace
- Úroveň 1: asistent řízení
- Úroveň 2: částečná automatizace řízení
- Úroveň 3: podmíněná automatizace řízení
- Úroveň 4: vysoce automatizované řízení
- Úroveň 5: zcela automatizované řízení
Požadavky na řidiče v závislosti na úrovni automatizace jízdy jsou shrnuty na obrázku 1.
Obrázek 2: Úrovně automatizace řízení
Asistenty řízení mají zvýšit komfort nebo bezpečnost jízdy a snížit psychickou a fyzickou náročnost řízení vozidla. Autonomní řízení úrovně 4 a 5 nevyžaduje žádnou akci řidiče, který se de facto stává cestujícím. Asistované řízení/autonomní řízení různých úrovní může být kombinováno v průběhu jedné jízdy, typicky je kombinováno kvůli technickým omezením asistenčních systémů (např. jízda úrovně 3 je možná jen ve specifických podmínkách pomalu jedoucí kolony). Kombinaci různých úrovní zobrazuje schéma na obrázku 2.
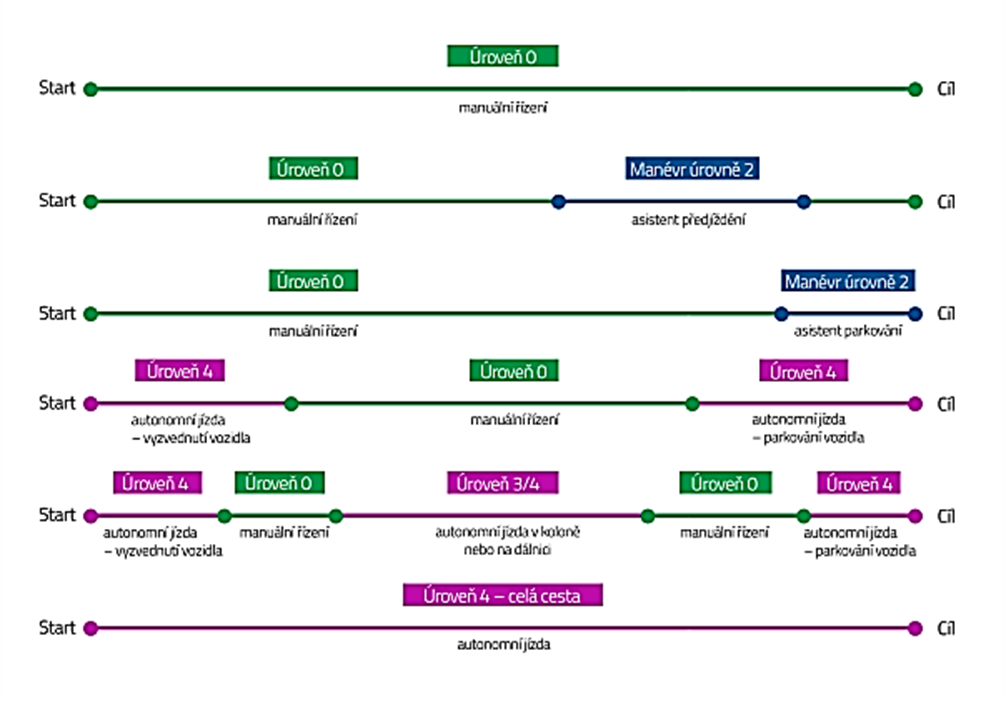
Obrázek 3: Kombinace úrovní asistence při řízení
Definice objektů
DDT: Dynamic Driving Task, - proces řízení vozidla na taktické a operační úrovni, tzn. rozpoznávání okolí a tomu přizpůsobené ovládání vozidla v reálném čase. Dynamickou řídící úlohu může vykonávat systém či řidič, popř. mohou spolupracovat.
MRM: Minimal Risk Maneuver – strategie chování vozidla v okamžiku, kdy řidič nereaguje na výzvu k převzetí řízení. Vozidlové systémy se snaží dosáhnout nejbezpečnějšího možného stavu. Typicky implementováno jako:
- Dočasné dodržování jízdy v jízdním pruhu,
- regulace rychlosti,
- zastavení a zapnutí výstražných světel (případně automatické zavolání pomoci),
- nouzové zastavení (s možností zaparkování na kraji vozovky).
NDRT: Non-driving Related Task – jakákoli úloha, kterou řidič řeší, s výjimkou těch, které se přímo týkají řízení vozidla nebo monitorování autonomních systémů řízení. Úloha má specifický definovatelný cíl a skládá se z (několika) činností. NDRT může být označována jako sekundární úkol, pokud primární úkol je řídit vozidlo (asistence řízení úrovně 0–2); pokud je vozidlo v režimu autonomní jízdy 3–5, může být samotná NDRT primární úlohou.
NDRA: Non-driving Related Activities – jakákoli činnost vyžadující vizuální, zvukovou, manuální nebo kognitivní kapacitu řidiče, která nesouvisí s řízením/monitorováním autonomního řízení.
OEDR: Object and Event Detection and Response – součást DDT, která obsahuje sledování okolního prostředí (detekce, rozpoznání a klasifikace objektů a událostí), přípravu reakce na okolí a provedení odpovídající reakce (např.: rozpoznání změny poloměru oblouku a odpovídající přizpůsobení natočení volantu).
ODD: Operational Design Domain – definované okolní prostředí, ve kterém vozidlo může být provozováno v odpovídajícím stupni automatického řízení (podmíněno např. počasím, viditelností, stavem dopravního značení, odlesky na objektech v okolí…).
RtI: Request to Intervene – upozornění řidiče, že musí převzít kontrolu nad jízdou vozidla (DDT). Pro vyhodnocení chování řidiče a přechodové fáze autonomní manuální řízení je potřebné znát čas RtI. Systémy úrovně 3 a vyšší musí mít explicitní RtI, pokud není zjevná z chování vozidla (ztráta tlaku v pneumatice, poškozené řízení…). Systémy úrovně 2 a nižší mohou přejít do stavu, který vyžaduje zásah řidiče bez RtI.
ADAS: Advanced Driver Assistance System - v češtině typicky používány termíny „pokročilý asistent řízení“ nebo „inteligentní asistent řízení“. Obecně jsou tak označovány asistenční systémy,1 součástí jejichž rozhodovací logiky je sledování okolí vozidla. Příklad: tempomat (snaží se udržovat rychlost bez ohledu na okolí) × adaptivní tempomat (přizpůsobí se rychlosti vozidla vpředu). Podskupinou ADAS jsou jednotlivé asistenty řízení jako ACC (adaptive cruise control), AEB (automatic emergency braking), LKA (lane keeping asist) a řada dalších systémů, např. pro rozpoznávání dopravních značek, adaptivní omezení maximální dovolené rychlosti (podle GPS polohy či dle rozpoznávání značek), upozornění na únavu řidiče, asistent dálkových světel a jiné; často jsou kombinovány. Někteří výrobci navíc různé ADAS pojmenovávají vlastními marketingovými termíny (např. autopilot).
Architektura popisovaného řešení
Architektura systému autonomního vozidla zahrnuje veškeré systémy, které jsou nutné k zajištění bezpečné a spolehlivé jízdy vozidla za definovaných provozních podmínek tak, aby při jeho normálním provozu nebylo nutné (nebo ani možné) zásahu řidiče. To umožňují systémy zajišťující:
- senzoriku sledující okolí,
- komunikaci vozidla s infrastrukturou,
- sledování vnitřních parametrů vozidla a jízdy,
- uživatelské rozhraní řidiče/operátora/vzdáleného operátora,
- zpracování a integrace získávaných dat, jejich vyhodnocování,
- navigace a strategie řízení
- vlastní řízení jednotlivých aktivních systémů jízdy (pohon, brzdy, aktivní bezpečnost atd.),
- zajištění bezpečnosti v případě poruchy nebo stavu mimo provozní podmínky.
Příklad realizace takového systému je na obrázku 3.
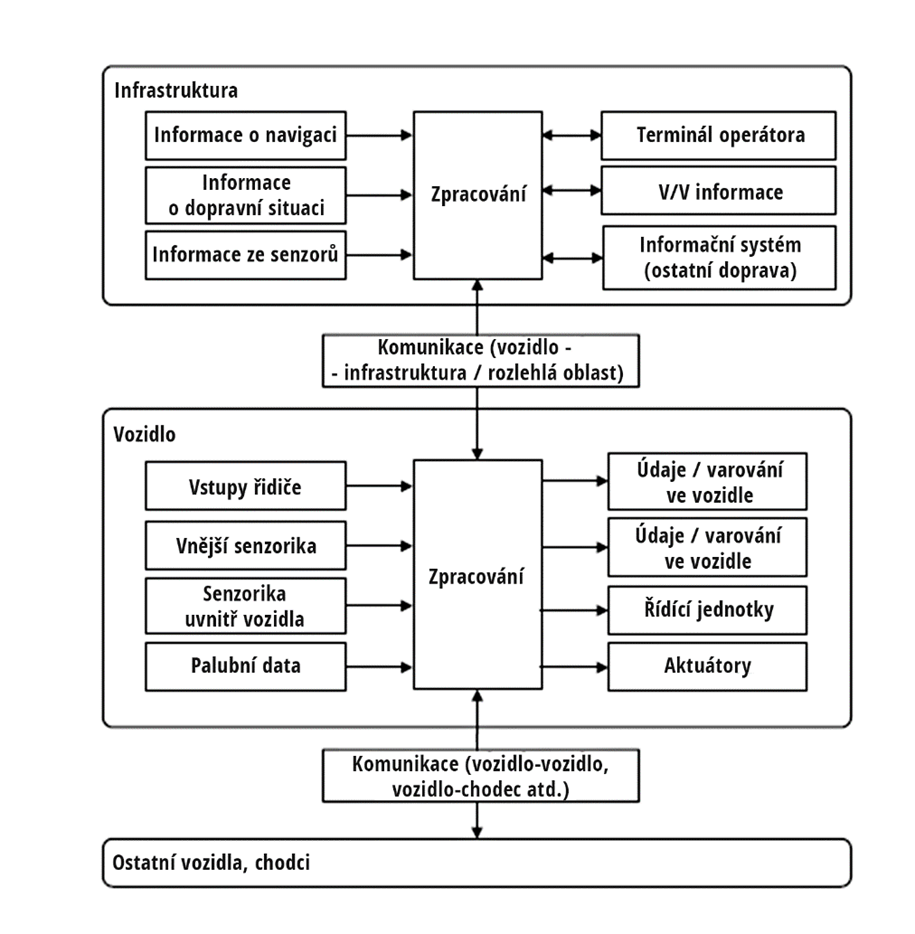
Obrázek 4: Diagram uspořádání a vazeb jednotlivých systémů obecného autonomního vozidla
Součástí návrhu asistenčních systémů je řešení mechanismů v případě selhání části řídící úlohy. U systémů úrovně 2 a nižší je řidič stále povinen sledovat chování vozidla i systémů a v případě potřeby (tzn. vnímaného nebezpečného chování) převzít okamžitě řízení. V případě systému třetí úrovně je před touto potřebou upozorněn. Je třeba už ve fázi návrhu řešit situaci, kdy řidič nezareaguje na upozornění a potom musí vozidlo autonomně dosáhnout bezpečného stavu (nejbezpečnějšího v dané situaci), typicky zastavit. Některé implementace úrovní 3 a 4 mohou spoléhat na zásah řidiče, který je mimo vozidlo (vozidlo je řízené člověkem z kontrolního centra umístěného mimo vůz).
Další důležitou součástí návrhu asistenčních systémů a systémů pro autonomní řízení je návrh rozhraní a ovládacích prvků, včetně informování řidiče o technických limitech systémů a možnostech selhání (v případě úrovní 0–3, kde se předpokládá monitorování systémů a převzetí řízení).
Přehled funkcí popisovaného řešení
Proces řízení lze schematicky rozdělit na funkční úrovně, přičemž jednotlivé úkoly mohou být rozděleny mezi automatizační systémy a řidiče, dle úrovně automatizace/autonomie vozidla. Samotný pohyb vozidla v prostoru v čase popisuje dynamická řídící úloha, jejíž součástí je sledování okolí vozidla (směrové a výškové vedení komunikace, signály, ostatní vozidla, limity, počasí…) a tomu odpovídající výstup – ovládání akčních členů vozidla, v případě řidiče ovládacími prvky, v případě asistenčního/autonomního řízení přímé řízené směru a výkonu. Následující obrázek ukazuje blokové schéma typického systému, který je v obecné rovině takto popsán pro budoucí standardy takovýchto systémů. Schematické rozdělení funkcí při řízení ukazuje diagram na Obrázek 4.
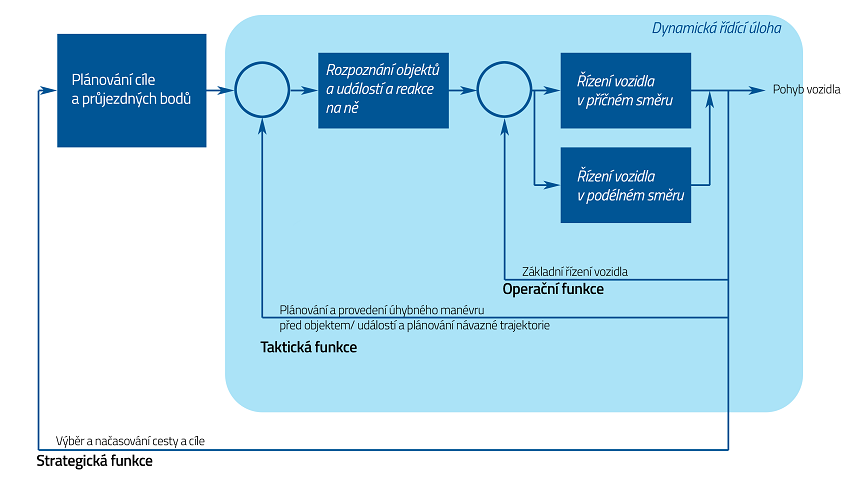
Obrázek 5: Schematický diagram řízení, dynamická řídící úloha
Aplikovatelnost
S rozvojem pokročilých asistenčních systémů řízení a příchodem reálné možností nasazení roboticky řízených silničních vozidel vznikla potřeba formalizace a definice úrovně automatizace jízdy. Dokumenty vycházejí jednak ze situace reálně dostupných asistenčních systémů (0-2), jednak ze zkušeností s provozem prototypů autonomních vozidel (3-5), které jsou v některých zemích za jistých omezených podmínek povoleny k provozu. V současné době se reálně některé skupiny prolínají (2 a 3). Přestože dnes většina prototypových automatizovaných vozidel odpovídá skupině 3, jsou z pohledu masové produkce a smíšeného provozu zřejmě neperspektivní a výrobci budou zřejmě reálně produkovat až stupně 4 a 5. Tyto definice (SAE J3016) jsou již používány v národních legislativách.
Odkazy a souvisící normy
Téma spadá do oblasti návrhu a zkoušení silničních vozidel.
Nadskupina: Silniční vozidla
Podskupiny: HMI autonomních vozidel, Minimální požadavky na bezpečné chování autonomního vozidla, převzetí kontroly řidičem, definice a zkoušení systémů autonomních vozidel.
Umístění v hierarchii témat
ISO/SAE PAS 22736, Intelligent transport systems -- Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles
ISO/TR 21959-1, Road Vehicles: Human Performance and State in the Context of Automated Driving: Part 1 – Common underlying concepts
ISO/TR 21959-2, Road Vehicles: Human Performance and State in the Context of Automated Driving: Part 2 – Considerations in designing experiments to investigate transition processes
ISO TR 20545 - Inteligentní dopravní systémy – Varovné a řídicí systémy vozidla / pozemní komunikace – Zpráva o standardizaci automatizovaných řídicích systémů vozidel (RoVAS) / Asistenční systémy nad rámec kontroly řidičem
SAE J3016, Surface Vehicle Recommended Practice, Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles
SAE J3114, Human Factors Definitions for Automated Driving and Related Research Topics