EN ISO 14814 - Automatická identifikace vozidel, zařízení a nákladů – Architektura a terminologie
Aplikační oblast: Automatická identifikace vozidel, zařízení a nákladů (AVI/AEI)
Rok vydání normy a počet stran: Vydána 2007, 20 stran
Zavedení normy do ČSN: Překladem
Rok zpracování extraktu: 2008
Skupina témat: Automatická identifikace vozidel, zařízení a nákladů
Téma normy: Architektura a terminologie
Charakteristika tématu: Popisuje architekturu systému automatické identifikace
Rozdělení architektury do 5 úrovní na koncepční, funkční, datovou, aplikační a implementační
Vysvětlení referenčních bodů architektury
Úvod
Tato norma je první ze skupiny norem zaměřených na automatickou identifikaci vozidla, nákladu či položky zařízení pro účely telematických aplikací. Popisuje architekturu systému automatické identifikace, tato architektura je rozdělena do 5 úrovní na koncepční, funkční, datovou, aplikační a implementační. Jako každý dokument o architektuře je i tento spíše koncepční, zavádí pojmy a vymezuje prostor pro další normy z této skupiny. Norma se nezabývá fyzickými aspekty jako je např. rozhraní, není závislá ani na frekvenci či radiovém rozhraní.
Užití
Tato norma poskytuje referenční model architektury pro AVI/AEI systémy a slouží jako základní norma stanovující terminologii. Je důležitá, ale ne nezbytná, pro práci s dalšími normami v oblasti automatické identifikace vozidel a nákladů. Slouží jako „rozcestník“ tím, že popisuje, co v rámci architektury je obsaženo v té které normě AVI/AEI. Pro pochopení normy je nezbytné si přečíst její přílohu uvádějící příklady popisovaných architektur.
Jak pro orgány státní správy, tak i pro výrobce zařízení a dodavatele telematických systémů má norma stejný, informativní význam. Uživatelé v ní naleznou velmi obecný popis referenční architektury AVI/AEI systémů.
1. Předmět normy
Tato norma specifikuje celkovou architekturu systémů pro automatickou identifikaci vozidel a zařízení (AVI/AEI) v pěti úrovních. Jedná se o koncepční, funkční, datovou, aplikační a implementační architekturu. Každý typ architektury je obecně popsán a je uveden odkaz na normu v rámci norem AVI/AEI, která danou problematiku řeší (například datová architektura v EN ISO 14816). Dále jsou zde uvedeny základní termíny a definice systému AVI/AEI.
Popis jednotlivých typů architektur je uveden v hlavním těle normy; podrobnější rozvedení popisu a použití je uvedeno v příloze A.
2. Souvisící normy
Čtenáři této normy nepotřebují pro její pochopení žádné další normy. Tato norma definuje architekturu norem automatické identifikace vozidel, a proto souvisí se všemi normami AVI/AEI.
3. Termíny a definice
V normě je uvedeno 28 termínů, z nichž klíčové jsou následující:
automatická identifikace zařízení AEI (automatic equipment identification AEI) - proces zjištění totožnosti zařízení nebo entit, které se používají při dopravě na pozemních komunikacích pomocí OBE obsahující jednoznačnou strukturu dat definovanou v této normě
automatická identifikace vozidla AVI (automatic vehicle identification AVI) - proces identifikace vozidla za použití jednoznačné datové struktury, jež je uložena v OBE, definované touto normou
palubní zařízení OBE (on-board equipment OBE) - zařízení zajišťující funkci AVI/AEI umístěné ve vozidle nebo jeho dalším zařízení
Další termíny a zkratky z oboru ITS jsou obsaženy ve slovníku ITS terminology (www. ITSterminology.org).
4 Požadavky
Tato kapitola je rozdělena do několika článků, kde je systém AVI/AEI rozebrán do pěti typů architektury ve shodě s doporučeními skupiny TC278 WG1 Architektura. V článku 4.2 Koncepční architektura norma stanovuje široký rozsah použitelnosti AVI/AEI vedoucí, pokud je zajištěno společné rozhraní, k zajištění interoperability systémů s různými vlastnostmi, a to i v mezinárodním prostředí.
Článek 4.3 Funkční architektura popisuje hlavní účel AVI/AEI, kterým je poskytnout jednoznačnou identifikaci.
Článek 4.4 Datová architektura stanovuje použití zápisu syntaxe ASN.1 pro popis datových prvků či konstrukcí a také jejich rozšiřitelnost, tak aby je bylo možné použít pro rozmanité aplikace vyžadující identifikaci. Poskytuje odkaz na normu 14816, která se datovou architekturou podrobně zabývá.
V článku 4.5 Aplikační architektura jsou rámcově stanoveny požadavky na systém AVI/AEI a rozhraní, ty jsou dále pokryty v normách 14816 Specifikace systému a 17264 Rozhraní.
V článku 4.6 Implementační architektura jsou popsány velmi stručně implementační aspekty s tím, že implementace mohou být různé, že závisí hlavně na výrobci a že implementace již není předmětem norem AVI/AEI.
Celkově jsou architektuře v hlavním těle normy věnovány 3 stránky, to znamená, že pro pochopení musela být připojena informativní příloha.
Příloha A (informativní) Kontext ITS/RTTT modelu referenční architektury AVI/AEI
A.1 Koncepční architektura
Interoperabilita je zajištěna, pokud existuje společné rozhraní v referenčním bodu delta. Jsou zde stručně popsány jednotlivé bloky a referenční rozhraní konceptuální architektury, viz obrázek 1.
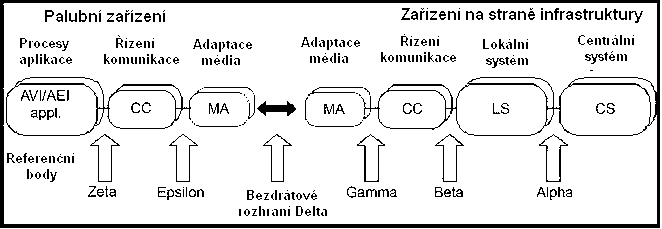
Vysvětlení referenčních bodů:
Alfa: Referenční bod, který vymezuje hranice funkcí centrálního systému a lokálního systému.
Beta: Referenční bod, kde data, příkazy apod. od pevného řízení komunikace přebírají funkce lokálního systému a obráceně.
Gama: Mezi pevným řízením komunikace a adaptací média.
Delta: Mezi palubním a pevným zařízením. Tento referenční bod obvykle odpovídá bezdrátovému rozhraní vyhrazeného spojení krátkého dosahu (DSRC).
Epsilon: Referenční bod mezi adaptací média a palubním řízení komunikace.
Zeta: Referenční bod mezi palubním řízením komunikace a aplikačními procesy.
A.2 Funkční architektura
Popisuje informační tok vedoucí k jednoznačné identifikaci. Tento tok je ukotven v čase a k určitému rozhraní, je stanovena posloupnost operací. Popis je založen na náčrtu vycházejícím z obrázku 1.
A.3 Aplikační architektura
Na obrázku vycházejícím z obrázku 1 popisuje, jak může být aplikační architektura navázána na konceptuální schéma. Tento popis je pouze obecného charakteru, protože se může případ od případu lišit.
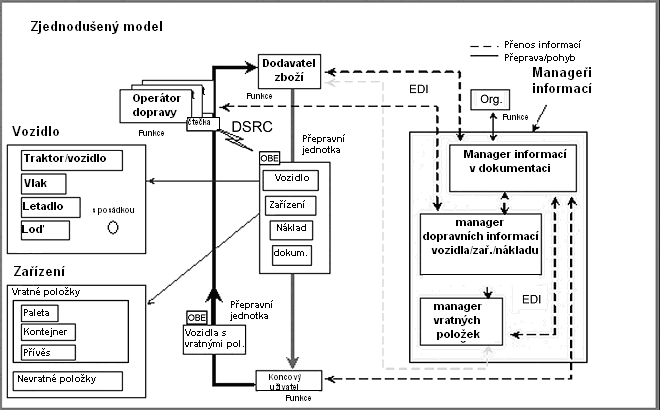
A.4 Objektově orientovaný model architektury
Převádí obrázky uvedené v předchozích článcích do objektově orientovaného popisu, viz obrázek 2.