
ISO 11067 - Inteligentní dopravní systémy – Systém varování před nadměrnou rychlostí vozidla při vjezdu do zatáčky – Funkční požadavky a zkušební postupy
Aplikační oblast: Varovné a kontrolní systémy ve vozidle a na pozemní komunikaci
Rok vydání normy a počet stran: Vydána 2015, 27 stran
Zavedení normy do ČSN: originálem
Rok zpracování extraktu: 2015
Skupina témat: inteligentní dopravní systémy
Téma normy: vozidlové asistenční systémy řidiče
Charakteristika tématu: přechodové stavy kontrolní funkce metody testování a jejich vyhodnocení diagnostické funkce
popis systému
popis strategie řízení; popis provozních parametrů a odezvy systému; popis minimálních funkčních požadavků
varovat řidiče před nepřiměřenou rychlostí vozidla při vjezdu do směrového oblouku
klasifikace systémů s ohledem na topologické parametry pozemní komunikace; specifikace HMI rozhraní
stavový diagram relace; definice testovacích metod;
definice rozsahu detekce; definice chybných reakcí; definice provozních limitů
specifikace parametrů časových kritérií pro rozhodování systému; specifikace parametrů detekční zóny ve 2D; specifikace provozních limitů systému; specifikace minimální hodnoty úhlu směrového oblouku
Úvod
Hlavní funkcí systému Curve Speed Warning Systems (CSWS) je varovat řidiče před nebezpečím způsobeným nepřiměřenou rychlostí vozidla před blížícím se směrovým obloukem. Systém vypočítá aktuální polohu vozidla s ohledem na nadcházející směrový oblouk a stanoví varovnou limitní rychlost, při níž ještě může vozidlo tento směrový oblouk bezpečně projet. Jestliže rychlost vozidla tuto limitní hodnotu překročí, systém varuje řidiče za účelem snížení rychlosti předmětného vozidla na takovou hodnotu, která umožní bezpečný průjezd následujícím směrovým obloukem. Systém CSWS nezahrnuje automatické intervenční funkce nebo prostředky řízení vozidla, které by zajistily požadovanou rychlost.
Užití
Tato norma slouží ke stanovení jednotného rozhraní a funkčních požadavků pro systém CSWS a jeho integraci do ostatních asistenčních a podpůrných systémů.
Pro orgány státní správy a projektanty pozemních komunikací přináší norma technické informace a specifikaci požadavků na zavádění systému CSWS do vozidel.
Pro výrobce vozidlových systémů a palubních jednotek je norma nepostradatelná, protože definuje provozní požadavky včetně technických parametrů a dále požadavky na testování systému.
1. Předmět normy
Tato norma obsahuje základní strategii varování, minimální funkční požadavky, základní prvky rozhraní řidiče, minimální požadavky na diagnostiku a odezvu na poruchové stavy, funkční požadavky a zkušební postupy pro systémy CSWS. Odpovědnost za bezpečné ovládání vozidla vždy zůstává na řidiči. Norma je zamýšlena pro využití systému ve vozidlech se čtyřmi a více koly.
2. Termíny a definice
Kapitola obsahuje 26 termínů a definic souvisících s touto normou. Klíčové termíny jsou následující:
předmětné vozidlo (subject vehicle)
vozidlo vybavené systémem CSWS vztažené k předmětu normy ISO 11067
funkční stavy systému (system states)
jeden nebo více stavů nebo fází činnosti systému (viz obrázek 1)
směrový oblouk (curved road)
úsek pozemní komunikace, kde poloměr zakřivení je menší nebo roven Rc
POZNÁMKA 1 k heslu Rc označuje maximální poloměr zakřivení, jež je považován pro účely potenciálního varování systému CSWS za bod zájmu oblouku (viz kapitola 5.2.2).
bod oblouku (curvature point)
libovolné body na směrovém oblouku, které mají přidruženou polohu a hodnotu křivosti
varovná prahová rychlost Vwt (warning threshold speed)
prahová rychlost vozidla užívaná k rozhodnutí, zda je varování systému CSWS vyžadováno
POZNÁMKA 1 k heslu Pokud je naměřená hodnota rychlosti vozidla větší než tato prahová hodnota, systém CSWS zahájí varování řidiče. Tato prahová hodnota se nachází pod maximální hodnotou rychlosti stanovenou k projetí následující zatáčky na základě navrženého příčného zrychlení.
reakční čas řidiče tresp (driver response time)
reakční čas řidiče je čas od počátku události směřující ke změně rychlosti do okamžiku, kdy řidič začne ovládat brzdový systém
jednoduchý oblouk (single curve)
jednoduchý směrový oblouk s konstantním poloměrem křivosti oddělený od ostatních směrových oblouků
POZNÁMKA 1 k heslu Může zahrnovat klotoidu.
úhel směrového oblouku AOC (angle of curved road)
středový úhel mezi počátečním bodem oblouku a koncovým bodem oblouku
3. Symboly a zkratky
Tato kapitola obsahuje 28 symbolů vztahujících se k předmětu normy, z nichž nejdůležitější jsou následující:
ad_req -minimální požadované zpomalení (m/s2)
ad_max- maximální brzdné zpomalení (m/s2)
alateral_max- maximální prahová hodnota příčného zrychlení, od které se vozidla projíždějící obloukem pozemní komunikace mohou odchýlit (m/s2)
dmax- na úseku směrového oblouku, maximální vzdálenost od bodu nacházejícího se na spojnici dvou sousedních topologických bodů pozemní komunikace, k bodu nacházejícím se na daném úseku oblouku (m)
Rmax- horní prahová hodnota poloměru křivosti vztažená k provoznímu rozsahu systému (m)
Vmin-minimální provozní rychlost systému CSWS (m/s)
Vmax-maximální provozní rychlost systému CSWS (m/s)
tCSW -čas zahájení varování systému CSWS (s)
4 Klasifikace
Systém CSWS popsaný v této normě je pouze jediného typu.
5 Požadavky
Zde jsou popsány matematicko-fyzikální závislosti, jež byly použity pro návrh systému CSWS. Zejména se jedná o stanovení prahových rychlostí pro varování, vymezení bodu zájmu cílového oblouku, základní tvary směrových oblouků či poloměry zakřivení požadované pro dosahovaný stav. popis kapitoly zde… (o čem je z čeho se skládá…)
5.1 Základní funkční princip
Základní funkční přístupy jsou znázorněny na následujícím obrázku 1.
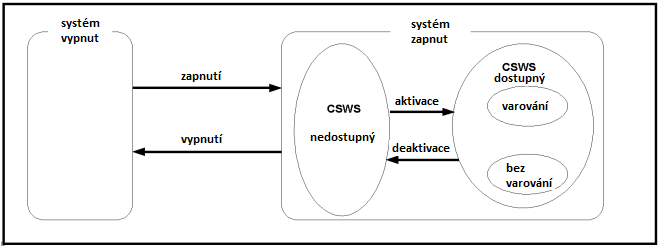
Tvary přechodových podmínek jsou následující:
podmínky, kdy systém CSWS přechází ze stavu vypnuto / OFF do stavu zapnuto / ON
podmínky, kdy systém CSWS přechází ze stavu ON do stavu OFF
Systém CSWS poskytuje minimálně následující provozní a přechodové stavy, které představují základní popis chování systému CSWS:
V pohotovostním stavu musí být systém CSWS schopen vyhodnotit aktivační kritéria a rozhodnout, zda bude vydáno varování. Pokud se systém rozhodne zahájit varování, je varování vydáno okamžitě.
Ve stavu, kdy systém CSWS není dostupný, není varování prováděno i přesto, že varovná kritéria jako poloha předmětného vozidla jsou monitorována, ale není prováděna kontrola tohoto stavu.
Ve stavu systému CSWS, kdy není poskytováno varování, systém musí vyhodnocovat aktivační kritéria. V tomto stavu systém však nesmí provádět varování.
Pokud jsou aktivační kritéria splněna, systém musí přejít ze stavu, kdy není varování poskytováno, do stavu, kdy je varování poskytováno. Tento přechod musí být automatický.
5.2 Funkční popis
Systém CSWS se skládá z prostředků pro určení poloměru křivosti pozemní komunikace, prostředků pro stanovení relativní polohy předmětného vozidla z bodu zájmu na oblouku, prostředků na určení rychlosti pohybu vozidla, prostředků na stanovení limitní rychlosti v bodě zájmu na oblouku a prostředků pro poskytnutí varování řidiče.
5.2.1- 5.2.7 Tyto podkapitoly přináší základní matematické vztahy, jež byly využity při návrhu varovných strategií systému CSVS, např. výpočet časových kritérií pro rozhodování systému.
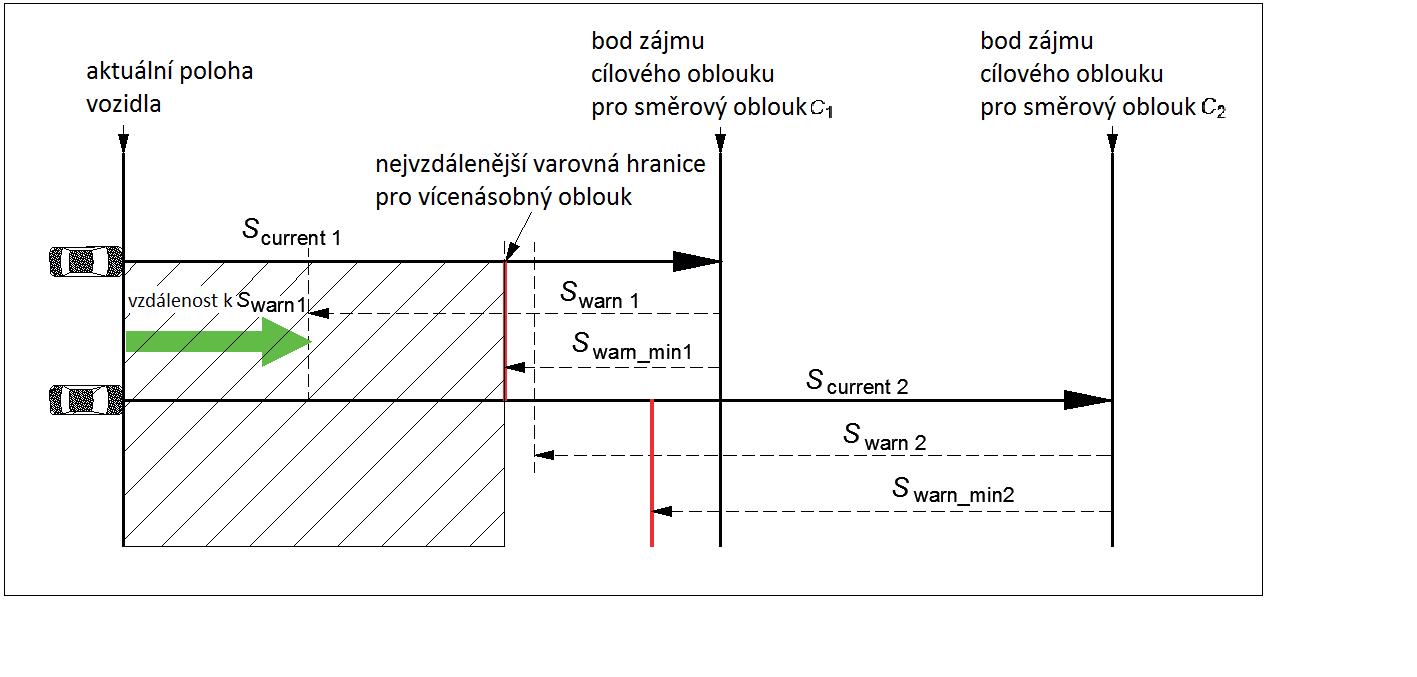
5.2.8 Přiměřenost varování v případě vícenásobného oblouku
Vícenásobné zakřivení je významný případ pro systém CSWS. Je důležité uvést, že je obtížné pro třetí stranu v testu posoudit, zda je varování zahájeno v nejbližším oblouku nebo až v následujícím oblouku, neboť výrobci mohou nastavit hodnotu parametru systému tcsw , stejně tak jako použité varovné algoritmy, podle vlastních preferencí. Jsou stanoveny dva případy, jež mají být uváženy za účelem potvrzení, zda varování bylo zahájeno před oběma limitními vzdálenostmi Swarn_min1 a Swarn_min2, viz obrázek 2.
5.3 Základní rozhraní řidiče a možnosti zásahu systému
V této části jsou popsány požadavky na hmatové a provozní prvky rozhraní HMI včetně reakcí systému. popis
5.3.1 Provozní prvky a reakce systému
Řidič musí být varován, jakmile systém přejde do stavu varování, prostřednictvím nezávislého či kombinovaného propojení vizuálních, akustických, a/nebo hmatových prvků.
Řidič musí být informován o situaci, která má za následek aktivaci a deaktivaci systému CSWS a o omezeních výkonových parametrů systému prostřednictvím návodu k obsluze vozidla.
Pokud systém CSWS není z důvodu závady systému k dispozici, řidič o tom musí být informován a popis zprávy musí být uveden v návodu k obsluze vozidla.
5.4 Provozní limity
Systém musí být schopen provozu při všech rychlostech vyšších než Vmin. Hodnota Vmin může být zvolena výrobci.
Prostředky pro určení polohy vozidla, jakým je jednotka Globálního Navigačního Satelitního Systému (GNSS), nemusí být plně funkční v závislosti na členitosti terénu a přítomnosti okolních staveb. Toto by mělo být uvedeno v návodu k obsluze vozidla.
6 Testovací metody hodnocení výkonu
Zahrnuje základní podmínky pro realizaci zkoušky systému CSWS včetně podrobného postupu testování. Například jsou zde obsaženy příklady pro návrh zkušební dráhy v případě jednoduchého směrového oblouku s poloměrem křivosti menším než 40 m a poloměrem křivosti větším než 200m.
6.1 Klimatické podmínky zkoušky
Zkouška musí být provedena na rovném, suchém a čistém asfaltovém nebo betonovém povrchu.
Teplotní rozsah musí být v rozmezí stanoveném normou.
Viditelnost v horizontálním směru musí být větší než hodnota stanovená normou.
6.2 Podmínky pro zkušební dráhu
Stanovuje podmínky, jež jsou kladeny na testovací dráhu z hlediska směrového a výškového vedení trasy včetně návrhu poloměrů směrového oblouku.
6.3 Podmínky pro zkušební vozidlo
Hmotnost zkušebního vozidla musí být v rozmezí mezi celkovou pohotovostní hmotnosti vozidla (včetně maziv, chladicí kapaliny, náplně do ostřikovačů, pohonných hmot, náhradního kola, hasicího přístroje, standardní sady náhradních součástek, zakládacích klínů a standardní brašny na nářadí) plus řidič a testovací vybavení (společná hmotnost řidiče a testovacího vybavení nesmí překročit hmotnost stanovenou normou) a nejvyšší povolenou celkovou hmotností (stanovenou správním úřadem jako maximální).
6.4 Instalace a konfigurace zkušebního systému
Systém CSWS musí být nainstalován a nakonfigurován v souladu s pokyny výrobce. V případě, že systém vyžaduje pro svou činnost digitální mapový podklad, je část tohoto mapového podkladu, která simuluje (nebo vyjadřuje) zkušební dráhu, instalována pro účely testu do systému CSWS. Systém musí být během testu v provozním stavu.
Zkušební dráha musí být umístěna v otevřeném prostoru, tak aby přijímač GNSS fungoval správně.
Systém CSWS, který získává poznatky o jízdní trase prostřednictvím informací z předcházející jízdy, může načíst údaje o trase předem, aby je mohl následně využít pro výpočet poloměru křivosti.
K provedení této zkoušky mohou být využity vrstvy silniční mapové databáze dané zkušební dráhy.
Pokud je systémem CSWS prováděn Test B na virtuálním směrovém oblouku, musí být systémem CSWS zajištěna kontrola, zda je odpovídající virtuální mapová databáze načtena.
6.5 Zkušební postup
Následující parametry musí být předmětným testovacím vozidlem zaznamenávány s možností jejich obnovení v případě ztráty: čas varování; poloha varování; rychlost předmětného vozidla na začátku varování.
Všechna varování, jež nastala během zkoušky, musí být zaznamenána. Data musí být obnovitelná prostřednictvím jiného měřícího zařízení, než je systém CSWS. Přesnost zkušebního zařízení musí být uvedena ve zkušební zprávě.
Společně se zaznamenanými daty musí být přiložen skutečný tvar zkušební dráhy, který obsahuje poloměr křivosti zkušebního oblouku a polohu bodu zájmu cílového oblouku.
Příloha A Popisy oblouků (informativní)
Příloha obsahuje grafické popisy směrového oblouku, body zájmu oblouku a body zájmu cílového oblouku. Směrové oblouky mohou být rozděleny do pěti skupin. Typy směrových oblouků jsou popsány v tabulce A.1.
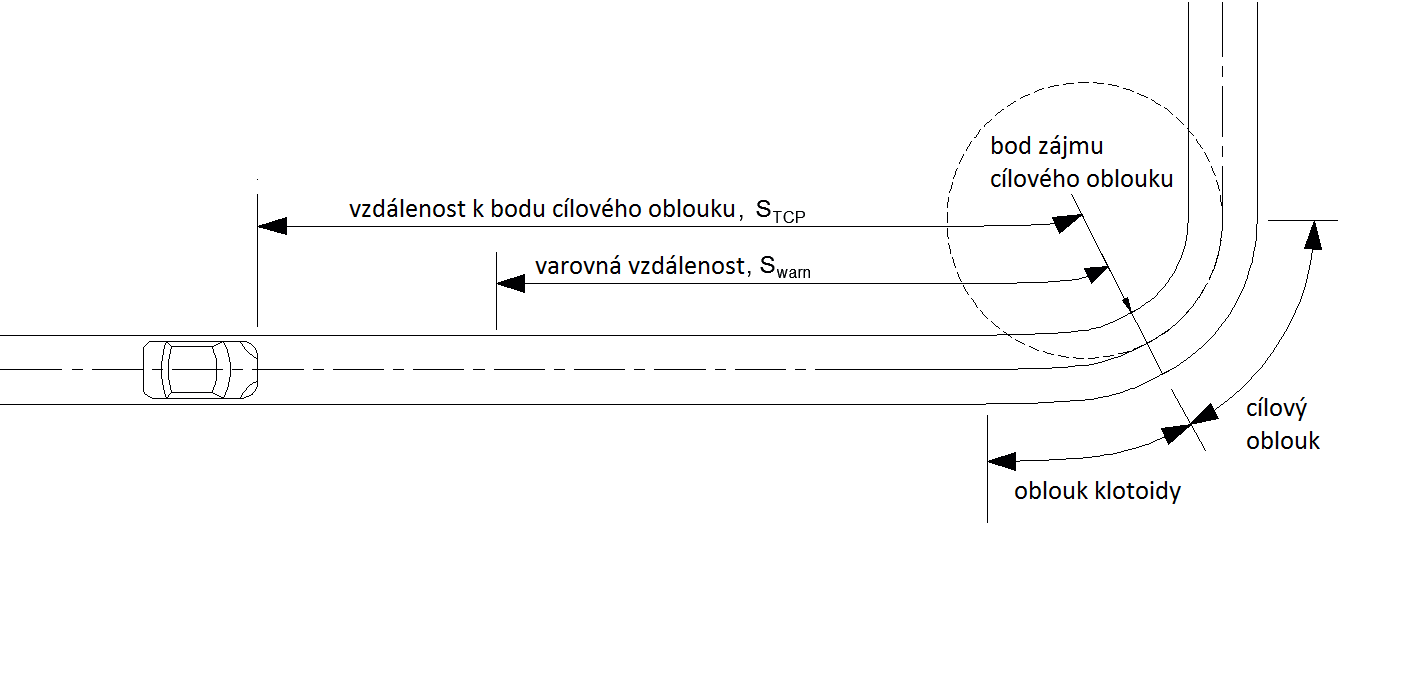
Příloha B Funkční principy (informativní)
Tato příloha popisuje funkční principy systému CSWS, viz obrázek 3 níže.
a) Systém CSWS kontroluje při jízdě předmětného vozidla okamžité zakřivení pozemní komunikace v rámci dohledové vzdálenosti řidiče. Dále jsou kontrolovány podmínky křivosti a vybrány body zájmu oblouku.
b) Pokud jsou aktivační kritéria splněna, systém CSWS přechází do pohotovostního stavu. Systém posuzuje, zda by mělo či nemělo být vydáno varování. Pokud se systém rozhodne vydat varování, je varování zahájeno okamžitě.
Příloha C Výpočet minimální hodnoty AOC (informativní)
Systém CSWS je zamýšlen na snížení nebezpečí při průjezdu směrovým obloukem. Při stejném poloměru křivosti směrového oblouku může být nebezpečí menší, pokud je hodnota AOC (úhel směrového oblouku) nižší, viz obrázek C.1 normy.