
ISO 11270 - Inteligentní dopravní systémy – Asistenční systémy pro udržení vozidla v jízdním pruhu (LKAS) – Funkční požadavky a zkušební metody
Aplikační oblast: Varovné a kontrolní systémy ve vozidle a na pozemní komunikaci
Počet stran: 107
Zavedení normy do ČSN: Převzetím originálu
Rok zpracování extraktu: 2014
Skupina témat: inteligentní dopravní systémy
Téma normy: vozidlové asistenční systémy řidiče
Charakteristika tématu: přechodové stavy kontrolní funkce metody testování a jejich vyhodnocení
popis systému
popis strategie řízení; popis provozních parametrů a odezvy systému; popis strategie varování
varovat řidiče před neúmyslným výjezdem z jízdního pruhu; příčné vedení vozidla
klasifikace systémů s ohledem na topologické parametry pozemní komunikace; specifikace HMI rozhraní
stavový diagram relace; definice testovacích metod;
definice rozsahu detekce; definice chybných reakcí; definice provozních limitů
specifikace provozních limitů systému; specifikace parametrů aktivačních kritérií systému
Úvod
Funkční požadavky a datový model pro vozidlovou navigaci jsou již definovány v technické specifikaci ISO/TS 20452. Nicméně mapově vztažené funkční požadavky, datový model (logický datový model/logická organizace dat) a datové prvky potřebné pro lokální dynamické mapy kooperativních ITS služeb, které jsou obsahem této technické specifikace, doposud definovány nebyly. Technická specifikace se zaměřuje na datové prvky statické povahy. Za účelem plnění plánovaného požadavku směrnice M/453 vydané Evropskou komisí, je rozsah tohoto návrhu omezen na vydání technické specifikace pro lokální dynamické mapové komponenty normy ISO 14296.
Užití
Tato specifikace může pomoci vývojářům kooperativních ITS aplikací, kteří budou mít prospěch z dostupnosti normalizovaného datového modelu a datových prvků. To umožní vývojářům nových produktů a služeb zkrátit čas mezi vývojem a uplatněním na trhu. Obsah tohoto dokumentu koresponduje s technickou specifikací prvků lokálních dynamických map, jež jeobsažena v dokumentu ISO 14296chváleného v dubnu 2011.
Pro orgány státní správy a projektanty pozemních komunikací přináší norma technické informace a specifikaci požadavků na zavádění kooperativních ITS aplikací.
Pro výrobce vozidlových systémů a palubních jednotek je norma nepostradatelná, protože definuje aplikační a funkční požadavky včetně technické specifikace pro lokální dynamické mapové prvky a různé případy užití.
1. Předmět normy
Tato technická specifikace poskytuje mapově související funkční požadavky, datový model a datové prvky pro lokální dynamickou mapu pro ty aplikace z oblasti kooperativních ITS aplikací, které vyžadují informace odvozené z mapových databází.
2. Souvisící normy
ISO 14825:2011 Inteligentní dopravní systémy – Geografické datové soubory (GDF) – GDF5.0(Intelligent transport systems — Geographic Data Files (GDF) — GDF5.0)
ISO/TS 20452:2007 Požadavky a logický datový model pro formát fyzického ukládání dat (PSF) a rozhraní aplikačního programu (API) a logická organizace dat pro PSF používaná v inteligentních dopravních systémech (Requirements and Logical Data Model for a PhysicalStorageFormat (PSF) and an Application Program Interface(API) and Logical Data Organization for PSF used in Intelligent Transport Systems (ITS) Database Technology)
3. Termíny a definice
Kapitola obsahuje 67 termínů a definic souvisících s touto normou. Klíčové termíny jsou následující:
přiřazení adresy (address location)
kategorie aplikace, která se zabývá úlohami vyjadřujícími reálnou pozici na zemi v rámci datové reprezentace PSF
POZNÁMKA 1 k heslu Jedná se o jednu ze šesti kategorií aplikací.
mapový geoprvek (cartographic feature)
prvek datového modelu, který reprezentuje geometrickou informaci pro účely zobrazení; mapový geoprvek nemá explicitně stanovenou topologii a může být 0-, 1- a 2- rozměrového typu a zobrazení
prvek (figure element)
entita datového modelu, která uvádí vlastnosti obrazce mapového geoprvku pro zobrazení mapy
silniční uzel (junction)
navigační geoprvek, kterým je buď pojmenované GDF propojení nebo pojmenované GDF křížení a které přiřazuje pojmenovaný navigační geoprvek k množině linií, uzlů a míst
úroveň (level)
podmnožina mapových dat vycházející z klasifikace dat stejného sémantického obsahu, kdy klasifikace je založená na úrovni podrobnosti/hustoty a vztažená ke konceptu různých mapových měřítek
POZNÁMKA 1 k heslu Úroveň 0 se považuje za nejnižší úroveň (největší podrobnost); vyšší úrovně jsou číslovány úroveň 1, úroveň 2 atd.
PŘÍKLAD Data znázorněná na mapě mohou být uspořádána do šesti úrovní reprezentujících různá měřítka znázornění (zoomu).
lokální dynamická mapa (local dynamic map)
konceptuální uložiště dat, které je zabudované ve stanici ITS a které obsahuje topografické, poziční a stavové informace
prvek pozemní komunikace (road element)
entita datového modelu, která je primitivním prvkem pozemní komunikace; prvek pozemní komunikace je totéž co spojení s tím rozdílem, že prvek se nenapojuje na křížení
4. Symboly a zkratky
Kapitola obsahuje 9 nejrůznějších zkratek a zkrácených odborných termínů vztahujících se k předmětu normy, z nichž nejdůležitější jsou následující:
ADAS- pokročilý asistenční systém (advanced driver assistance system)
DB- databáze (database)
GDF- geografický datový soubor (geographic data file)
LDM- lokální dynamická mapa (local dynamic map)
POI- bod zájmu (point of interest)
PSF- formát fyzického ukládání dat (physical storage format)
5 UML reprezentace diagramů
Tato technická specifikace využívá UML k vyjádření specifických vztahů; grafické prvky jsou využívány k vyjádření specifických vazeb a strukturních vztahů. Plnou definici lze nalézt v ISO/IEC 19501:2005. Nicméně krátké seznámení se základními prvky je uvedeno v příloze B.
6 Zkratky
Kapitola obsahuje 9 nejrůznějších zkratek a zkrácených odborných termínů vztahujících se k předmětu normy, z nichž nejdůležitější jsou následující:
ADAS pokročilý asistenční systém (advanced driver assistance system)
DB databáze (database)
GDF geografický datový soubor (geographic data file)
LDM lokální dynamická mapa (local dynamic map)
POI bod zájmu (point of interest)
PSF formát fyzického ukládání dat (physical storage format)
7 Požadavky
7.1 Úvod
Tato technická specifikace definuje aplikační a funkční požadavky.
7.2 Aplikační požadavky
Tato technická specifikace podporuje základní množinu aplikací kooperativních systémů, služeb podporujících řízení a navigačních služeb.
Základní množina aplikací kooperativních systémů je definovaná v příloze C. Služby podporující řízení jsou popsány v příloze D. Vztahy mezi základní množinou aplikací kooperativních systémů a službami podporujícími řízení jsou uvedeny v příloze F.
7.3 Funkční požadavky
7.3.1 Přehled
Šest funkcí (zobrazení mapy, stanovení polohy, plánování trasy,
průvodce trasou, přístup k informacím o službách a bodech zájmu (POI) a přiřazení adresy) je uvedeno shodně jako v ISO/TS 20452:2007. Ostatní funkce jsou nově definovány touto technickou specifikací.
7.3.2 Zobrazení mapy
7.3.2.1 Obecný popis
Funkce Zobrazení mapy je používaná k zobrazení mapy určité geografické oblasti. Aplikace může zobrazit mapy koncovému uživateli ale také přijímat od koncového uživatele vstup označující polohu zobrazené mapy (poloha začínající bodem a kliknutím zařízení).
7.3.3 Stanovení polohy
7.3.3.1 Obecný popis
Funkce Stanovení polohy je používána k určení polohy vozidla, například zeměpisnou šířkou a zeměpisnou délkou entity silniční sítě nebo pro přiřazení polohy na mapu „Map Matching“. Map Matching je metoda určující, kde se navigační systém na silniční síti pohyboval a to na základě předcházející polohy navigačního systému a dat o pohybu navigačního systému z externích vstupů. Metoda umožňuje zpřesnit směrové a výškové parametry pozemních komunikací.
7.3.4 Plánování trasy
7.3.4.1 Obecný popis
Funkce Plánování trasy je používána pro stanovení trasy mezi dvěma body definovanými uživatelem
7.3.5 Průvodce trasou
7.3.5.1 Obecný popis
Funkce Průvodce trasou je používaná pro generování instrukcí pro následování trasy.
7.3.6 Přístup k informacím o službách a bodech zájmu (POI)
7.3.6.1 Obecný popis
Funkce Přístup k informacím o službách a bodech zájmu (POI) poskytuje přístup k datům, které jsou běžně užívány jako počátky nebo cíle tras a které obsahují informace užitečné pro cestující. Služby představují bodový či plošný objekt na trase, který je znám spíše svým jménem než svou adresou. Služby zahrnují komerční služby pro cestující, jako jsou informace o hotelích, restauracích a čerpacích stanicích pohonných hmot. Služby také zahrnují polohu nebo body zájmu pro cestující, jako jsou národní parky, národní památky či turistické zajímavosti. Služby mohou být uspořádány podle typu (např. letiště, centra měst, hotely) a mohou nést různé informační atributy (např. hodnocení, druh kuchyně, příjem kreditních karet).
7.3.7 Přiřazení adresy
7.3.7.1 Obecný popis
Tato funkce se používá pro přístup k datům užívaným k určování poloh, jak v reálném prostředí, tak při jejich datové reprezentaci v mapě.
7.3.8 Podpora jízdy
7.3.8.1 Obecný popis
Funkce Podpory jízdy je používána k poskytování informací pro podporu bezpečné jízdy.
8 Logický datový model
8.1 Celkový model
8.1.1 Obecně
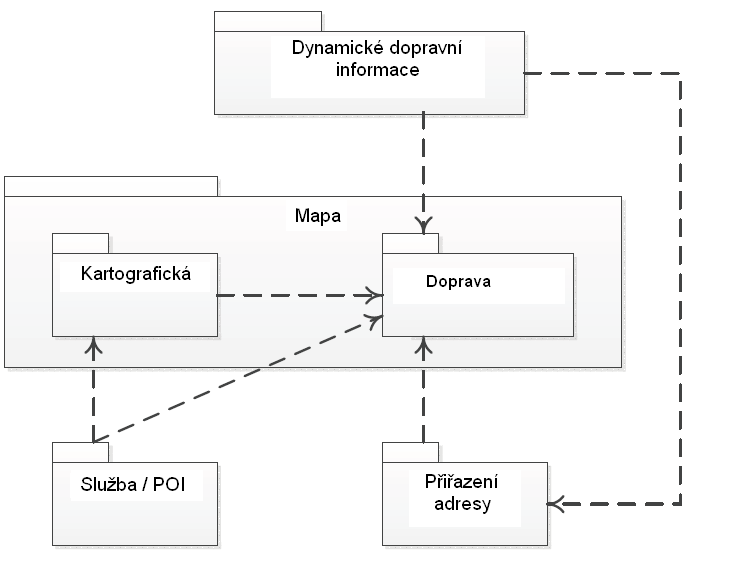
Celkový model znázorněný na obrázku 1 představuje vztahy mezi níže uvedenými objekty datového modelu. Tento celkový model je založen na ISO/TS 20452. Obsahuje následující entity: doprava, kartografická mapa, přiřazení adresy, služby/POI, dynamické dopravní informace.
8.2 Doprava
8.2.1 Přehled
Objekt Doprava je navržen tak, aby podporoval kooperativní ITS.
Doprava obsahuje silniční data, topologické uspořádání silniční sítě a navádění na trasu.
8.3 Kartografická mapa
8.3.1 Přehled
Kartografická mapa je složena z grafického pozadí a grafického textu.
8.4 Služby/POI
8.4.1 Obecné
Služby/POI jsou definovány službami v ISO/TS 20452. Nicméně služby/POI jsou v této specifikaci složeny ze služeb a referenčního bodu služby/POI.
8.5 Přiřazení adresy
8.5.1 Obecně
Přiřazení adresy je v ISO/TS 20452 složeno z místa, názvu navigačního geoprvku, úseku pozemní komunikace, vedlejší pozemní komunikace, propojení a poštovního směrovacího čísla. Nicméně v této specifikaci přiřazení adresy obsahuje místo a referenční bod místa.
8.6 Dynamické dopravní informace
Dynamické dopravní informace jsou využívány k poskytování informací o dopravních podmínkách v reálném čase. Tyto podmínky mohou být využity při dynamickém výpočtu trasy, podpoře jízdy a pro službu kooperativních ITS systémů. Navíc mohou být tyto dopravní informace zobrazeny jen jako informační podklad společně s ostatními funkčními zobrazeními mapy.
Základní entitou dynamických dopravních informací je dopravní poloha. V reálném světě to může odpovídat poloze oblasti, lineární poloze, např. úseku pozemní komunikace, nebo poloze bodu, např. poloze křížení na pozemní komunikaci.
8.7 Relační vztahy mezi úrovněmi silničních datových entit
8.7.1 Obecně
Existuje mnoho datových úrovní mapových entit a relačních vztahů mezi těmito úrovněmi.
8.8 Nastavení pravidel pro identifikátor (ID) spojnice, ID bodu připojení křižovatky, ID úrovňového křížení
V této specifikaci ID spojnice, ID bodu připojení křižovatky a ID křížení musí být jedinečné.
Příloha A (normativní) – Abstraktní sestava zkoušek
Tato abstraktní sestava zkoušek je platná pro souhrnná data odvozená z této technické specifikace.
Příloha B (informativní) – Popis prvků UML
Tato technická specifikace využívá nově vytvořenou metodologii označovanou UML k vyjádření strukturovaných zákonitostí.
Příloha C (normativní) – Základní množina aplikací vymezující užití
Základní množina aplikací je definována v ETSI TC ITS TR 102638 a ETSI TC ITS TR 102863, jak je uvedeno v příloze.
Příloha D (informativní) – Přehled příkladů výsledných služeb
Tato příloha je členěna do čtyř částí: informace o pozemní komunikaci (varování), informace z okolí vozidla (varování), řízení vozidla a dopravní informace.
D.1.3 Informace o jízdním pruhu
Příkladem je zprostředkování informací o pozemní komunikaci s jízdním pruhem pro proměnný směr jízdy vozidel, který je navržen za účelem zmírnění kongesce.

(D.1.3 s přehledem informačních služeb k jízdnímu pruhu)
D.1.7 Informace o dopravní zóně
Systém může nabízet řidiči informace o momentálním využití místní pozemní komunikace, například o rozdělení pozemní komunikace na část využívanou chodci a část využívanou vozidly, za účelem zvýšení bezpečnosti žáků a dětí při cestě do školy.
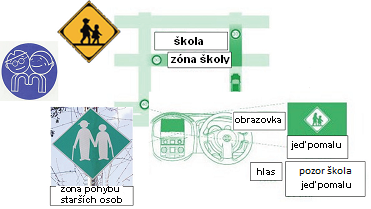
(D.1.7 s nabídkou silničních informací)
Příloha E (informativní) – Příklady výsledných služeb včetně datových toků
Uvedené dopravní toky pocházejí z japonských případů užití.
Příloha F (normativní) – Vztah mezi relacemi základní množiny aplikací a službami podporujícími řízení
Tento relační vztah je v příloze popsán na vybraných aplikačních třídách, například aktivní silniční bezpečnosti, místních spolupracujících službách aj.