
ISO 18682 - Inteligentní dopravní systémy (ITS) – Systémy detekce vnějšího nebezpečí a upozornění řidiče – Základní požadavky
Aplikační oblast: Varovné a kontrolní systémy ve vozidle a na pozemní komunikaci
Rok vydání normy a počet stran: Vydána 2016, 20 stran
Rok zpracování extraktu: 2016
Skupina témat: inteligentní dopravní systémy
Téma normy: kooperativní asistenční systémy řidiče
Charakteristika tématu: konfigurace systému kontrolní funkce metody detekce okolního nebezpečí
popis systému; popis poskytovaných informací
popis strategie varování; popis provozních parametrů a odezvy systému
sběr informací z infrastruktury a propojených vozidel pro účely varování řidiče
klasifikace systémů s ohledem na druh bezdrátové komunikace
definice výpočtu časových parametrů vyhýbacího a brzdného manévru; definice výpočtu varovné vzdálenosti s ohledem na informování řidiče; definice výpočtu ujeté dráhy v průběhu činnosti systému
definice rozsahu detekce; definice provozních limitů stanovení reakčního času systému
specifikace parametrů systému s ohledem na časové rozlišení detekce nebezpečí;
Úvod
Systémy detekce vnějšího nebezpečí a upozornění řidiče rozpoznávají provozní stavy vozidla a okolního prostředí s využitím palubních senzorů nebo prostřednictvím komunikace mezi infrastrukturou a vozidlem (I-V), nebo mezi vozidly navzájem (V-V) a varují nebo informují řidiče o okolním nebezpečí. Norma se věnuje mnoha vozidlovým funkcím jako je indikace pomalého vozidla, varování před nebezpečím srážky, asistence při změně jízdního pruhu, varování před světelným signálem stůj a asistence při průjezdu křižovatkou. Mimoto jsou zde zahrnuty běžné požadavky pro některé další systémy detekce vnějšího nebezpečí a upozornění řidiče. Tato norma není zamýšlena k poskytování požadavků pro konkrétní systémy definované v jednotlivých normách, ale k poskytování obecných požadavků vycházejících ze základních principů pro detekci vnějšího nebezpečí a upozornění řidiče. Na tuto normu by se v budoucnu měli odkazovat návrháři nejrůznějších systémů při svém vývoji. Očekává se, že bude zajištěna jednotnost a součinnost při návrhu systémů, což sníží pravděpodobnost chybné interpretace řidičem. Pro lepší pochopení základních požadavků jsou přiloženy vzorové výpočetní rovnice. Mimoto jsou v přílohách uvedeny příklady výpočtů pro vybrané systémové funkce.
Užití
Tato norma specifikuje základní požadavky na systémy poskytování varovných a informačních zpráv řidiči. Požadavky obsahují základní principy uvědomění řidiče, časovou posloupnost mezi zprávami, intervaly mezi zprávami a informační prvky, které by měly být do zpráv zahrnuty. Systémy detekce vnějšího nebezpečí a upozornění řidiče rozlišují různé rizikové stavy, které hrozí aktuálně, v nejbližších okamžicích nebo potenciálně a uvědomují řidiče varovnou zprávou, aby co nejdříve přizpůsobil řízení a rychlost vozidla takové situaci. Metody implementace jednotlivých funkcí jakými jsou detekce nebezpečných podmínek, komunikace a zprostředkování informací řidiči, nejsou v tomto dokumentu popsány. Matematické vztahy a vypočtené časové úseky nebo ujeté vzdálenosti mají v dokumentu pouze informativní nikoliv normativní charakter.
Pro orgány státní správy a projektanty dopravních systémů přináší norma technické informace a specifikaci požadavků na zpřístupnění varovných systémů v rámci dopravní infrastruktury.
Pro výrobce vozidlových systémů a palubních jednotek je norma nepostradatelná, protože definuje provozní požadavky na varovné systémy řidiče, včetně rozhraní HMI (Human Machine Interface).
1. Předmět normy
Mnoho pracovních skupin ISO a jiných organizací věnujících se technické normalizaci řeší otázky podpory jízdní bezpečnosti. Předmětem technické komise ISO/TC204 je přenášet kladné přístupy v oblasti varovných a řídicích systémů vzešlé z interakce vozidlo / jízdní dráha na řidiče. V rámci technické komise ISO/TC204 jsou specifikovány všeobecné požadavky na bezpečnostní systémy i na obdobné systémy jakými jsou přenosné zařízení, jež by měly tvořit klíčové nebo primární požadavky umožňující definovat ostatní systémové požadavky. Systémy detekce vnějšího nebezpečí a upozornění řidiče jsou zamýšleny, aby poskytovaly řidiči asistenční funkce varování před nejrůznějšími formami nebezpečí vně vozidla.
2. Souvisící normy
ISO DTS 17425, Inteligentní dopravní systémy — Kooperativní systémy — Specifikace datové výměny infrastrukturních silničních a dopravních dat pro potřeby prezentace ve vozidle
ISO/TR 12204 Silniční vozidla — Ergonomická hlediska dopravních, informačních a řídicích systémů — Integrace časově kritických a bezpečnostních varovných signálů
ECE/TRANS/WP.29/2011/90 Pokyny pro vytváření požadavků na vysoce prioritní varovné signály
3. Termíny a definice
Kapitola obsahuje následujících 5 klíčových termínů a definic souvisících s touto normou:
oznámení nebezpečí (hazard notification) – informace zprostředkovaná řidiči upozorňující na vnější nebezpečí
varování (warning) – jeden z možných způsobů oznámení nebezpečí řidiči, který pro odvrácení vnějšího nebezpečí vyžaduje provedení zásahu
uvědomující zpráva (awareness message) – jeden z možných způsobů oznámení nebezpečí řidiči, upozorňující na potenciální vnější nebezpečí hrozící v následujícím krátkém časovém úseku
rizikový stav (hazardous condition) – vnější podmínky, které znamenají reálné nebezpečí vzniku nehody nebo srážky
bezpečný stav (safe state) – jízdní stav, který nastane vyhnutím se rizikovým podmínkám
4 Systémy detekce vnějšího nebezpečí a upozornění řidiče
Výstražné systémy rozlišují různé rizikové podmínky v podobě okamžitých nebo potenciálně nebezpečných situací, a varují řidiče a/nebo ho informují o nutnosti přijmout opatření při řízení vozidla tak, aby se vyhnul nebezpečné situaci v co nejkratším čase.
Výstražné systémy upozorňující řidiče na možné nebezpečí se člení do dvou skupin podle svého účelu a užití:
Varovné - systémy analyzují bezprostředně hrozící nebezpečí a vyhodnocují, zda je potřebné o daném nebezpečí okamžitě informovat řidiče. Řidič by po tomto varování měl jednat bezodkladně, aby kolizi zabránil;
Informativní - systémy analyzují potenciálně nebezpečné situace a informují řidiče, kdy, pokud bude nadále pokračovat ve stávajícím režimu jízdy, bude riziko nehody vysoké. Řidič by se po tomto varování měl připravit na realizaci akce v blízkém čase.
Členění systémů detekce vnějšího nebezpečí a upozornění řidiče
Výstražné systémy shromažďují informace z různých zdrojů, posuzují povahu nebezpečí a následně informují řidiče. Podle původu zdroje informací se výstražné systémy dělí do dvou základních skupin:
autonomní výstražné systémy - posuzují situaci s využitím informací z vozidlových systémů a informují řidiče;
kooperativní výstražné systémy – posuzují situaci s využitím informací z externích systémů, jakými jsou dopravní infrastruktura, nebo jiné dopravní prostředky, prostřednictvím bezdrátové komunikace a informují řidiče, případně další účastníky silničního provozu.
Funkční prvky varovných systémů
Funkční prvky jsou znázorněny na obr. 1 a zahrnují následující logické celky:
funkce detekce;
funkce vyhodnocení;
funkce HMI – někdy rovněž označovaná jako interakce člověk-stroj;
komunikační funkce.

Detekční blok vyhodnocuje nebezpečné podmínky s využitím senzorů nebo uložených dat a poskytuje výstupy vyhodnocovacímu bloku. Vyhodnocovací blok tyto informace následně zpracuje a vydá stanovisko k předání varovných a informačních zpráv do bloku HMI, který na základě těchto dat vydá varovnou zprávu řidiči. Čas potřebný k distribuci informací mezi vozidlovými jednotkami musí být zahrnut do výpočetního času každé funkce. Rizikové podmínky jsou rozlišeny nejen z pohledu jednoduchého záznamu měřených hodnot ale zároveň s ohledem na časovou značku, ostatní měřené hodnoty a další zdroje informací.
5 Požadavky na výstražné informační systémy
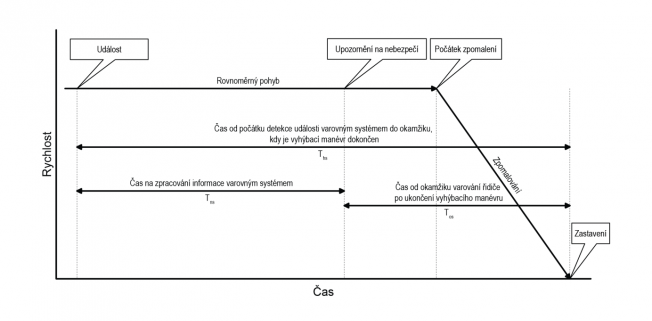
Výstražné systémy detekují a vyhodnocují potenciální nebezpečí a následně informují řidiče o možnostech kolizi odvrátit. Varování řidiče proto musí být poskytnuto v takovém předstihu, aby řidič stihl reagovat před vznikem kolizní situace.
Čas od počátku zjištění události do střetu by měl být delší než čas vyjádřený následujícím vztahem:
 , kde:
, kde:
ths – čas od počátku detekce nebezpečné situace systémem, do okamžiku úniku z nebezpečné situace;
tns – čas potřebný na realizaci oznámení o nebezpečné situaci řidiči;
tos – čas od okamžiku oznámení nebezpečné situace po únik z této nebezpečné situace.
Riziko střetu se snižuje se zvyšováním předstihu, s jakým jsou informace o možné kolizi vyhodnoceny. Příklad časového průběhu před kolizního děje je znázorněn na obr..2.
Vzdálenost potřebná pro oznámení nebezpečí
Nebezpečí musí být oznámeno řidiči v takové vzdálenosti před očekávaným místem střetu, aby byl zajištěn dostatek času na vyhodnocení informací, oznámení řidiči, řidičovu reakci a změnu dynamiky pohybu vozidla. Vzdálenost od místa, kde systém začal detekovat událost, do místa možného střetu, by měla být delší než vzdálenost, uvedená v následujícím vztahu:
 , kde:
, kde:
lhs – vzdálenost od počátku detekce systému nebezpečí, do okamžiku úniku z nebezpečné situace;
lns – vzdálenost potřebná na realizaci oznámení o nebezpečné situaci řidiči;
los – vzdálenost od oznámení nebezpečné situace po únik z nebezpečné situace.
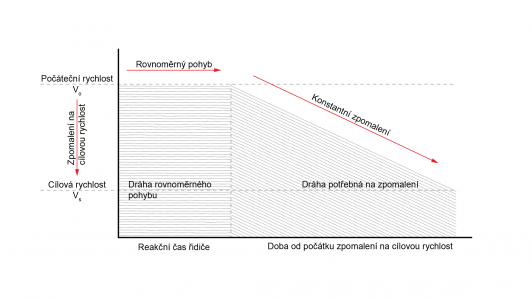
Příklad výpočtu vzdálenosti
Příklad situace, kdy se využije jízdního manévrování s užitím brzdění (dopředný únik). Vzdálenost ujetá během jízdního manévru je vyjádřena vztahem:
 , kde:
, kde:
los – vzdálenost od oznámení nebezpečí po únik;
vo – počáteční rychlost vozidla (předpokládá se, že je konstantní);
vs – konečná rychlost vozidla ve fázi úniku;
trh – reakční čas řidiče;
 – zrychlení vozidla ve fázi úniku (předpokládá se, že je konstantní).
– zrychlení vozidla ve fázi úniku (předpokládá se, že je konstantní).
Vzdálenost vozidla před místem střetu v okamžiku oznámení nebezpečné situace, je znázorněna na obr. 3.
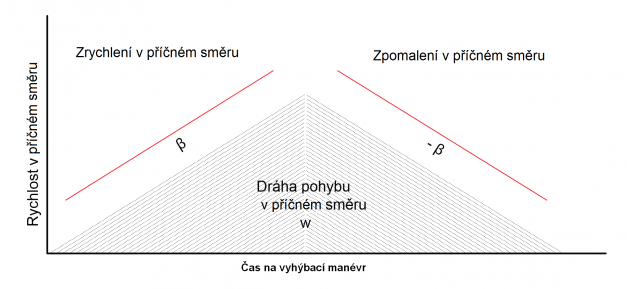
Příklad situace, kdy se k odvrácení nehody využije jízdní manévr (únik do strany). Vzdálenost ujetá během jízdního manévru je vyjádřena vztahem:
l , kde:
, kde:
los – vzdálenost od oznámení nebezpečí po únik;
vo – počáteční rychlost vozidla (předpokládá se, že je konstantní);
trh – reakční čas řidiče;
β – boční zrychlení vozidla při změně jízdního pruhu (předpokládá se, že je konstantní);
w – dráha ujetá v příčném směru během vyhýbacího manévru.
Vzdálenost vozidla před očekávaným místem střetu v okamžiku oznámení nebezpečí, je znázorněna na obr. 4.
6 Požadavky stanovené mimo rámec funkčních požadavků
Prioritní varování patří mezi nejvýznamnější formy aktivní ochrany osádky vozidla. V případě, že se vyskytne několik různých nebezpečných situací v krátkém sledu po sobě, např. krátký čas do kolize, pak vysoce prioritní varování musí být upřednostněno. Bezpečnost při návrhu a implementaci systémů detekce vnějšího nebezpečí a upozornění řidiče musí být založena na analýze rizik. Kvalitativní parametry informací jako jsou přesnost, aktuálnost a spolehlivost by měly být zohledněny již v průběhu zpracování varovné zprávy pro řidiče. Dokonce i v případě výskytu chyby by mělo být oznámení řidiči realizováno spolehlivě s ohledem na požadovanou kvalitu informací. Navíc je žádoucí využívat informace jen s odpovídajícím informačním obsahem a optimalizovat jejich vliv na řidiče. Výstupy varovných systémů nesmí být ve vzájemné kolizi. Z tohoto důvodů je důležité, aby si řidič mohl sám nastavit parametry těchto systémů (formu výstupu, intenzitu zvuku, parametry obrazu apod.) tak, aby je vzájemně nezaměňoval. V tomto smyslu je nezbytné, aby systémy, které reprezentují vyšší míru nebezpečí, byly upřednostněny před ostatními varovnými systémy.
Příloha A Posouzení časového sledu a ujeté dráhy vozidla pro účely oznámení nebezpečné situace řidiči — případová studie (informativní)
Tato příloha obsahuje otevřené otázky, které se stále diskutují. Následně vydaná rozhodnutí budou obsažena v příloze B. Poté, co budou otevřené otázky kompletně vyřešeny, budou z přílohy A odstraněny a ponecháno konečné rozhodnutí v příloze B.
Zde je na příkladu asistenční služby znázorněn časový sled dynamických parametrů pohybu vozidla a okamžik poskytnutí varovné zprávy řidiči. Pro ilustraci jsou uvedeny dva příklady varovných hlášení:
- podpora při předcházení kolizních stavů s vpředu se nacházejícími překážkami. (kooperativní typ zařízení I-V) Tento typ asistence upozorňuje řidiče na vpředu zastavující vozidlo.
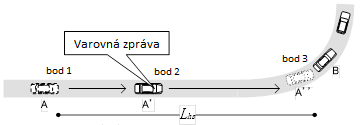
- podpora při předcházení kolizních stavů v příčném směru pohybu vozidla (kooperativní typ zařízení V-V).
Tento typ asistence varuje řidiče stojícího na křižovatce (při vjíždění do ní) před blížícím se vozidlem.