

ISO 22840 - ITS – Podpůrné systémy sledování překážky při nižších a středních rychlostech při couvání
Aplikační oblast: Varovné a kontrolní systémy ve vozidle a na pozemní komunikaci
Počet stran: 25
Zavedení normy do ČSN: převzetím originálu
Rok zpracování extraktu: 2009
Skupina témat: inteligentní dopravní systémy
Téma normy: vozidlové asistenční systémy řidiče
Charakteristika tématu: přechodové stavy kontrolní funkce metody testování a jejich vyhodnocení
popis systému
popis strategie řízení; popis provozních parametrů a odezvy systému; popis strategie varování
varovat řidiče před přítomností překážek nacházejících se v dráze vozidla při couvání při vyšších rychlostech
klasifikace systémů s ohledem na sledovanou oblast okolo vozidla specifikace HMI rozhraní
definice testovacích metod;
definice rozsahu detekce; definice chybných reakcí; definice provozních limitů kritéria pro aktivaci/deaktivaci systému; specifikace samokontroly systému
specifikace parametrů detekční zóny ve 3D; klasifikace parametrů systému podle detekčních rozsahů
Úvod
Tato norma nebyla dosud zavedena do ČSN. Je součástí norem zaměřených na vozidlové asistenční a varovné systémy. ERBA představují detekční zařízení s bezkontaktními senzory, které pomáhají řidiči při nižších až středních rychlostech při couvání. Tyto systémy detekují a varují řidiče před objekty nacházející se v dráze vozidla. Ve srovnání se zařízeními pro podporu jízdy jen při pomalých rychlostech, jejichž hlavním významem je asistence při parkovacích manévrech, je účelem ERBA pomoc při couvání při vyšších rychlostech na delší vzdálenosti. ERBA systémy počítají dynamický odhad nebezpečí kolize (například využití algoritmu čas do kolize) a varují řidiče, jehož okamžitá pozornost je vyžadována z důvodu předejití kolize s detekovanou překážkou.
Užití
Využití normy lze spatřit pro výrobce motorových vozidel, dodavatele originálního příslušenství, autorizované zkušebny silničních vozidel, certifikační či homologační laboratoře a další. Tato mezinárodní norma je zaměřena na lehká vozidla ( např. osobní vozidla, pick-upy, lehká dodávková vozidla a sportovní vozy mimo motocyklů). Norma stanovuje minimální funkční požadavky, které řidič od systému může očekávat, jako detekce a informace o přítomnosti významné překážky v detekčním pásmu. Norma rovněž stanovuje minimální požadavky pro indikaci poruchy systému. Dále zahrnuje pravidla pro strategii poskytování obecných informací avšak bez omezení na druh poskytované informace či zobrazovací systém. ERBA systémy jsou zamýšleny jako doplněk vnitřních a vnějších zpětných zrcátek, ne však k eliminaci potřeby těchto zrcátek. Automatické zásahy (například použití brzd k odvrácení nehody mezi předmětným vozidlem a překážkou) nejsou zahrnuty v této normě.
Tato technická norma může být využita i v jiných normách rozšiřujících podrobně ERBA systémy, například pro potřeby specifikace návrhu senzorů nebo definice vyšší úrovně funkcionality. Její využití lze spatřit pro výrobce motorových vozidel, dodavatele originálního příslušenství, autorizované zkušebny silničních vozidel, certifikační či homologační laboratoře a další.
Pro výrobce zařízení a dodavatele dopravních telematických systémů tato norma obsahuje důležité pokyny, jaké funkční požadavky mají takovéto systémy splňovat a technické parametry pro jejich zkoušení.
1. Předmět normy
Podpůrné systémy sledování překážky při nižších a středních rychlostech (ERBA) jsou detekční nástroje s bezkontaktními senzory, které asistují řidiči při couvání. Tyto systémy detekují a varují řidiče před překážkami situovanými v dráze vozidla. V porovnání se zařízeními pracujícími pouze při nízkých rychlostech, jejichž účelem je asistence při parkování (tj. ISO 17386), je účelem ERBA asistovat při couvání vyšší rychlostí pro překlenutí delších vzdáleností.
Tato norma stanovuje minimální funkční požadavky, které může řidič od systému očekávat, jako je detekce a sdělení o přítomnosti určité překážky v dráze vozidla v daném sledovaném prostoru. Norma stanoví minimální požadavky na indikaci selhání systému a zkušební metody funkčních charakteristik.
Tato norma se nezabývá požadavky na zařízení pro nákladní vozidla, to řeší ISO/TR 12155.
2. Souvisící normy
ISO/TR 12155 Komerční vozidla – Zařízení pro detekci překážky při couvání – Požadavky a zkoušky
ISO 17386 ITS – Pomoc při manévrování při nízkých rychlostech (MALSO) – Funkční požadavky a zkušební postupy
ISO 2575 Silniční vozidla — Symboly pro ovládací prvky, indikátory a kontrolní ukazatele
EN ISO 15006 Silniční vozidla — Ergonomické aspekty dopravních informačních a řídících systémů — Specifikace a zkoušky shody pro vozidlové akustické výstupy
EN ISO 15008 Silniční vozidla — Ergonomické aspekty dopravních informačních a řídících systémů — Specifikace a zkoušky shody pro vozidlové vizuální výstupy
ISO 16750 (všechny části) Silniční vozidla – Podmínky prostředí a zkoušení pro elektrické a elektronické vybavení
3. Termíny a definice
Norma uvádí 15 termínů a definic.
3.1 podpůrný systém sledování překážky při nižších a středních rychlostech při couvání ERBA (Extended Range Backing Aid System) vyhovující ERBA systém je systém schopný varovat řidiče o přítomnosti překážek v prostoru za vozidlem (nazvaném Sledovaná zóna) a vydat varování k signalizaci požadované okamžité reakce řidiče
3.2 aktivace systému (system activation) aktivace systému je proces přechodu činnosti systému z klidového stavu do aktivního stavu. V aktivním stavu systém monitoruje tzv. „sledovanou zónu“ (Zone of Regard), vyhodnocuje detekované objekty a generuje vhodná znamení a/nebo varování k řidiči
3.3 akustické informace a varování (audible information and warning) akustické informace a varování představují akustickou indikaci nebo signalizaci, která je využita ke zprostředkování informace řidiči o překážkách vyskytujících se ve sledované zóně
3.4 obrazové informace a varování (visual information and warning) vizuální informace a varování představuje vizuální indikaci nebo signalizaci překážky zprostředkovanou řidiči, která se vyskytuje ve sledované zóně; příklady jsou uvedeny v příloze A
3.5 dotekové informace a varování (tactile information and warning) jsou fyzické stimuly, jež jsou užívány ke zprostředkování informace o přítomnosti překážky ve sledované zóně k řidiči; příklad je uveden v příloze A
4. Symboly a zkratky
Norma uvádí 22 symbolů.
5 Požadavky na funkci a provedení
5.1 Úhel natočení kol
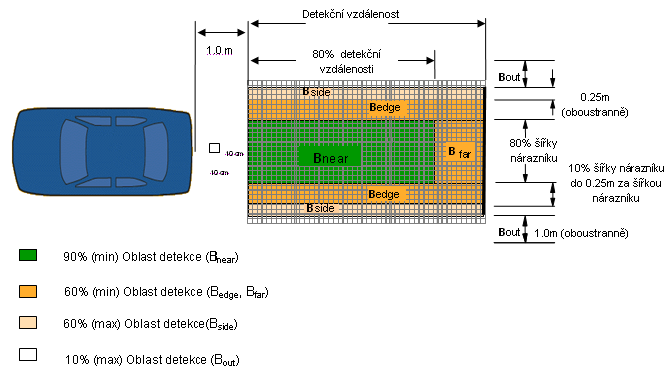
Jako minimální požadavek by systém ERBA měl podporovat jízdní úkony při přímém couvání. Azimut sledované zóny definovaný touto normou vztahující se primárně k užitému případu je znázorněn na obrázku 1. ERBA systémy mohou přizpůsobit úhel natočení kol za účelem lepší detekce překážky na dráze vozidla v zatáčce, nicméně tato norma nezahrnuje požadavky na provedení systémů pro přizpůsobení úhlu natočení kol. Požadavky této normy jsou platné pro fázi couvání s řízením nastaveným v neutrální poloze.
5.2 Rozsah detekce
ERBA systémy by měly detekovat cíle umístěné v definovaném rozmezí za nárazníkem zádi vozidla. ERBA systémy mohou detekovat cíle blíže než je definovaná hodnota, nicméně norma nezahrnuje požadavky na provedení pro takovýto rozsah. Je doporučeno, aby systémy, jež mohou detekovat cíle blíže, než je definovaná hodnota, vyhovovaly normě MALSO (ISO 17386).
5.3 Minimální požadavky na provedení
Minimální požadavky na provedení systému ERBA jsou uvedeny v tabulce 1. Ve sloupci „detekční vzdálenost (m)“ je uvedena nejmenší a největší vzdálenost. Tzn., že systém ERBA musí začít detekovat objekty maximálně x m od vozidla a dále pokračuje do vzdálenosti x m od vozidla.
V kolonce „přibližovací rychlost (m/s)“ je uveden minimální rozsah rychlostí, ve kterých musí systém ERBA detekovat překážky.
Detekční vzdálenost | (m/s) | Detekce zpoždění | Způsob varování | ||||
Blízká | Vzdálená | Prům. | Max. | Varování přítomnosti | |||
x (max) | x (min) | 0.0 - 3.0 | 150 | 250 | volitelné | volitelné | vyžadováno |
Detekce provedení | ||||
BNear | BEdge | BFar | BSide | BOut |
90% Min | 60% Min | 60% Min | 60% Max | 10% Max |
5.4 Detekce zpoždění
5.4.1 Inicializace detekce zpoždění
U systémů bez vizuální nebo akustické indikace připravenosti systému je daný čas odezvy měřen od okamžiku, kdy dojde k rozsvícení světel zpětného pohybu a nastartování vozidla do okamžiku, kdy systém ERBA vydá varování o možné existenci překážky ve sledované zóně. Průměrný čas odezvy by neměl převýšit definovanou dobu (viz norma).
U systémů pouze s vizuální indikací připravenosti systému je čas odezvy měřen od okamžiku, kdy je prezentována připravenost systému, do momentu, kdy systém ERBA vydá varování o možnosti výskytu překážky ve sledované zóně. Průměrný čas odezvy by neměl převýšit dobu definovanou v normě, přičemž žádná měřená hodnota by neměla převýšit 250ms.
U systémů pouze s akustickou indikací připravenosti systému je čas odezvy měřen od okamžiku, kdy je ukončena připravenost systému, do té doby, než systém ERBA vydá varování o možnosti výskytu překážky ve sledované zóně. Průměrný čas odezvy by neměl převýšit hodnotu uvedenou v normě.
Pro systémy, které mají vizuální i akustickou indikaci jsou vyžadovány jen podmínky stanovené pro akustickou indikaci.
5.4.2 Zpoždění indikace a varování
Po celou dobu, kdy je systém aktivní, by nemělo časové zpoždění mezi výskytem případné překážky ve sledované zóně a její indikací přítomnosti převýšit definovanou dobu, viz norma.
5.5 Rozhraní řidiče a informační strategie
5.5.1 Představení všeobecných informací
Rozhraní řidiče by mělo být schopno prezentovat alespoň akustické informace. Vizuální informace mohou být použity jako doplňkové. Všeobecná informační strategie by měla být základem pro vývoj těchto typů informačních komponent, což učiní využití v různých druzích vozidlech snadnější a bezpečnější. Nicméně, konkrétní informační strategie nemůže být stanovena, neboť například:
existuje mnoho rozdílných způsobů kodifikace informací
každý výrobce vozidla vyžaduje flexibilitu při integraci podpory při couvání do vlastního informačního systému řidiče tak, aby byl zajištěn soulad s celkovým návrhem vozidla
5.5.2 Akustické informace
Akustické informace mají být prezentovány shodně s normou ISO 15006. Pro akustický informační kanál je doporučen následující základní kód.
Indikace vzdálenosti (v případě, že je použita) může být prezentována buď akusticky, nebo vizuálně. Jestliže je uvedena, měla by být rozčleněna alespoň do dvou zón (např. blízká a vzdálená). Tyto zóny mohou být reprezentovány různou frekvencí opakování (nebo i proměnnou frekvencí) se základním pravidlem, kdy vysoký počet opakování nebo souvislý zvuk či vysoká frekvence odpovídají krátké vzdálenosti. Jestliže je použit odlišný nebo doplňkový kód, nemělo by to být v rozporu se základním pravidlem. Může být použita i syntetizovaná řeč nebo nahraná hlasová zpráva. Obecně by mělo varování o překážce přicházet jen po dobu jejího výskytu a ustat, jakmile již překážka není detekována. Akustické informace mohou být dočasně automaticky vypnuty po určité době (definované výrobcem). Nicméně systém by měl zůstat v aktivním stavu. Jakmile se vzdálenost mezi vozidlem a překážkou sníží, měl by být akustický signál opět automaticky zapnut. Naopak při zvětšující se vzdálenosti od překážky by měl akustický signál zůstat vypnut.
Varování o přítomnosti překážky může být řidiči prezentováno akusticky, vizuálně nebo oběma způsoby. Je povoleno kombinovat varování o přítomnosti překážky a indikaci vzdálenosti. Může být rovněž využita syntetizovaná řeč nebo nahraná hlasová zpráva. Obecně by mělo varování o překážce přicházet jen po dobu jejího výskytu a ustat, jakmile již není překážka detekována. Akustické informace mohou být dočasně automaticky vypnuty minimálně po 1 s. Přesto by měl systém zůstat v aktivním stavu.
Dynamické varování by mělo být realizováno akusticky, ale může být i vizuální. Toto varování by mělo být jednoznačně odlišitelné od varování vzdálenosti nebo přítomnosti překážky a mělo by přirozeně pobízet řidiče, aby na ně okamžitě reagoval.
Indikace stavu systému aktivní/neaktivní nebo indikace chyby/poruchy může být prezentována akusticky nebo vizuálně a měla by být zřetelně odlišitelná od jiných signálů. Může být rovněž využita syntetizovaná řeč nebo nahraná hlasová zpráva
Výrobce může umožnit řidiči manuální volbu dočasného potlačení zvukového varování. V tomto případě zůstane zvukové varování potlačeno až do okamžiku, kdy je řidič opět zapne. Zvukové varování bude automaticky obnoveno poté, co je systém povolen.
Tato norma nezavádí přesný algoritmus, jež má být využit při přechodu mezi jednotlivými stavy akustického varování (přítomnosti, vzdálenosti a dynamického varování). Nicméně obecná pravidla pro přechod mezi jednotlivými stavy jsou taková, že přechod by měl být navržen hladký a intuitivní. Hystereze je doporučena pro zmírnění "blikání" (kmitání) mezi jednotlivými typy výstrah. Toto je zejména významné pro dynamickou formu výstrah.
V případě, kdy přítomnostní varování není prezentováno během celého detekovaného rozsahu systému nebo je prezentováno po dobu méně než 3s, pak by pro účely ověřovacích zkoušek měl být k dispozici zvláštní diagnostický mód.
5.5.3 Vizuální informace
Vizuální informace by měly být poskytovány podle EN ISO 15008. Pro vizuální informační kanál je doporučen následující základní kód:
Vizuální informace by měla být zatříděna alespoň do dvou úrovní, které budou reprezentovány různými barvami, např. červená nebo žlutá pro úroveň 1 (bezprostředně hrozící nebezpečí) a zelená pro úroveň 2 (úroveň výstrahy). Tyto dvě úrovně mohou být dále rozděleny do více úrovní použitím více než jednoho grafického prvku stejné barvy, např. sloupcový graf se třemi červenými a třemi žlutými sloupci, umožňující až šest podúrovní.
Displej by měl být umístěn tak, aby minimalizoval pravděpodobnost potřeby řidiče měnit svůj pohled. Například se doporučuje umístit displej v zadní části prostoru pro cestující, protože to umožňuje řidiči souběžně sledovat displej při pohledu zpětným zrcátkem nebo umístit displej nad ramenem řidiče.
5.5.4 Kombinace akustických a vizuálních informací
Kombinace těchto dvou druhů informací může být použita ke zlepšení rozhraní řidiče nebo omezení možnosti rušení řidiče a spolucestujících, s ohledem ke specifickým výhodám obou typů informací. V případě, že intenzita akustické informace může být řidičem snížena, například z nabídky palubního systému rozhraní člověk-stroj (HMI), měla by být v uživatelském manuálu poznámka, nebo poskytnuta zpráva o HMI systému uvádějící, že varování nemusí být zaregistrováno v okamžiku, kdy je hlasitost nastavena na příliš nízkou. Vizuální varování by mělo být zachováno i v situaci, kdy je akustické varování potlačeno. Toto nastavení pomáhá řidiči připomenout, že se ve sledované zóně nacházejí objekty a odlišit tuto situaci od stavu "žádný cíl".
5.6 Aktivace systému
Systém se aktivuje automaticky, jakmile je zařazen alespoň zpětný rychlostní stupeň. Pro „neutrál“ je funkce systému rovněž povolena, a to v případě, kdy se vozidlo pohybuje dozadu.
5.7 Deaktivace systému
Systém může být deaktivován podle předem nastavených předvoleb konstruktéra. Pro deaktivaci nejsou v této normě uvedeny žádné specifické podmínky.
5.8 Provoz s přívěsným vozíkem
5.8.1 Manipulace se zařízením pro připojení přívěsného vozíku
Připojení přívěsného vozíku může ovlivnit správnou funkci systému ERBA a může také prodloužit zadní hranici vozidla. Pokud nelze zajistit řádnou funkci s namontovaným přívěsným vozíkem, je systém automaticky při montáži zařízení vypnut nebo bude využito manuální ovládání pro odpojení systému.
5.8.2 Provoz systému s připojeným vozíkem
Pro systém, který nemá možnost potlačit (manuálním odpojením) automatické vypnutí, bude elektrický obvod vozidla navržen takovým způsobem, aby došlo k automatickému pozastavení systému ERBA, jakmile dojde k elektrickému spojení tažného zařízení s přívěsným vozíkem. Nicméně pokud je přívěsný vozík vybaven kompatibilními senzory, mohou tyto v takovém případě informovat řidiče o překážkách při jízdě dozadu.
5.9 Požadavky na detekci přítomnosti
Tento článek obsahuje popis sledované zóny, viz obrázek 1, rozčleněné do osmi menších částí.
5.10 Požadavky na dynamickou detekci
5.10.4 Požadavky na dynamickou detekci výšky projekce
Následující požadavky na dynamickou detekci výšky projekce mají být systémem ERBA dosaženy v případě realizace zkoušky v souladu s postupem zkoušení (viz 7.5.2) využívající zkušební objekt. Varování musí být vydáno systémem alespoň pro dva ze třech řádků.
Požadavky detekce | Sloupec | |||||||||||||||||||
A | B | C | D | E | F | G | H | I | J | K | L | M | N | O | P | Q | R | S | T | |
Detekované buňky (min.) | x | x | x | x | x | x | x | x | x | x | x | x | x | x | x | 1 | 1 | 1 | 1 | 1 |
5.11 Schopnosti vlastní kontroly a indikace chyb
Systém disponuje následujícími funkcemi vlastní kontroly:
a) elektronických obvodů a vedení – systém kontroluje funkci elektronických prvků systému
b) součástí senzorů – systém kontroluje, zda-li se vyskytují nějaká poškození prvků systému, která by mohla vést k chybným funkcím systému.
Výše uvedené postupy budou provedeny automaticky tak, aby došlo k detekci možných chyb majících vliv na správnou funkci systému. Varovný signál bude vyslán v každém okamžiku, kdy dojde k detekci podmínek poruchy.
6. Požadavky a zkoušky součástí
Prvky systému budou navrženy v souladu s definovanými automobilními požadavky. Jako alternativa k interním zkouškám automobilových výrobců může být využita norma ISO 16750 jakožto základ pro postupy zkoušení jednotlivých součástí.
7. Požadavky na zkoušku
7.1 Zkušební objekty
7.1.1 Definice standardního zkušebního objektu
Článek definuje požadavky na standardní zkušební objekty používané při zkoušení detekčních schopností systému.
Doporučuje se, aby tyto zkušební objekty měly různé odrazové charakteristiky pro různé druhy senzorů. Záměrem je využívat definovaný zkušební předmět, který je reprezentantem alespoň některých očekávaných objektů reálného světa (například dřevěné kolo, kov či železobetonový sloup).
7.1.2 Systémy založené na ultrazvuku
Experimenty ukázaly, že se pro různé druhy materiálů odraz ultrazvuku výrazně nemění, pokud je povrch hladký a pro zvuk "tvrdý". Například kovové či dřevěné sloupy vykazují stejnou akustickou odrazivost jako plastické sloupy stejného průměru. Za zmínku rovněž stojí, že kovové sloupy jako zkušební objekty vykazují lepší tuhost a mohou být vyrobeny přesněji.
7.1.3 Radarové systémy
Výsledky zkoušek prokázaly, že trubkovitý zkušební objekt je vhodný pro reprezentaci reálných objektů, které byly detekované systémem užívajícím radarové senzory.
7.2 Vnější podmínky
Během zkoušky by rychlost větru neměla překročit definovanou hodnotu, viz norma. Teplota prostředí by se měla pohybovat v rozmezí 5 °C až 30 °C a během zkoušky by se neměly vyskytovat žádné srážky (dešťové, sněhové,…). Zkouška se provádí na rovném a suchém povrchu. Ze zkušební plochy bude odstraněno veškeré pomocné vybavení, stěny a jiné překážky tak, aby se eliminovaly nežádoucí interference zapříčiněné jejich odrazivostí.
7.3 Čas odezvy při detekci objektu
Přesné zkušební metody pro měření detekce zpoždění (viz tabulka 1) na tomto místě nejsou specifikovány, přesto zkušební postup a zkušební vybavení musí být schopno zajistit přesnost měření zpoždění systému do definované doby, dané normou. Je doporučeno, že minimálně 1,5 s vyžaduje vozidlový systém napájení a ECU k ustálení napětí po zapnutí zapalování před realizací této zkoušky.
7.4 Požadavky na zkoušení – varování přítomnosti
Provozní zkouška by měla být provedena na skutečném vozidle nebo na takovém zkušebním systému, který simuluje podmínky instalovaného zařízení do skutečného vozidla. V případě, kdy je pro provedení zkoušky použito vozidlo, bude toto vozidlo přistaveno s pohotovostní hmotností. Je povolena tolerance ±5%.
7.5 Požadavky zkoušení – dynamické varování
Následující obecné požadavky jsou nezbytné pro zajištění shody navrženého systému s funkčními požadavky této normy. Je na výrobci vozidel, aby stanovil podrobnosti zkušebního postupu.
Provozní zkouška by měla být provedena na skutečném vozidle nebo na reprezentativním zkušebním systému, který simuluje podmínky nainstalovaného zařízení v reálném vozidle. V případě, kdy je pro realizaci zkoušky použito vozidlo, bude mít toto vozidlo běžnou pohotovostní hmotnost. Je povolena tolerance ±5%. Jestliže je světlá výška vozidla nastavitelná, pak by měla být nastavena na hodnotu uvedenou pro běžné podmínky jízdy na zpevněné komunikaci.
Dále by měla být věnována pozornost návrhu všech upevňovacích přípravků zkušebních objektů tak, aby během provozní zkoušky byly detekovány pouze zkušební objekty.
7.5.1 Azimut sledované zóny – dynamické varování
Postup:
vytvořit souřadnicovou sít, viz obrázek 1
pokud detekční schopnosti zkušebního systému záleží na úhlu natočení kol předmětného vozidla, bude zkouška provedena s nastavením řízení do neutrální polohy (přímý směr jízdy)
zkouška bude realizována umísťováním zkušebního objektu ve sledované zóně, a to v každé pozici zobrazené na obrázku 3. Zkušební technik musí zajistit, že se bude s daným zkušebním objektem pohybovat pouze uvnitř každé příslušné části (např. BSIDE) a nedojde během zkoušky k umístění tohoto objektu do jiné části (např. BMIDDLE)
spustit zkušební systém, realizovat zkoušku, a zaznamenat, jestli je nebo není vydáváno dynamické varování. Detekce by měla být jednoznačná.
opakovat tento postup pro každou polohu zobrazenou na obrázku 3
Poznámka Je na rozhodnutí zkušební osoby realizovat postup zkoušky pro celou souřadnicovou síť nebo opětovně zapínat systém pro jednotlivé čtverce sítě.Na závěr by mělo být změřeno a zaznamenáno zpoždění zkušebního detekčního systému použitím vhodného zkušebního postupu.
7.6 Kritéria přijetí detekce – varování přítomnosti
7.6.1 Azimut sledované zóny – varování přítomnosti
Je pochopitelné, že celkový počet čtverců souřadnicové sítě v rámci konkrétní zóny se bude lišit v závislosti na šířce nárazníku předmětného vozidla.
Pozitivní kritéria přijetí jsou:
procentuální dosažení požadavku detekce pro každou zónu, viz 5.9.2
pro zónu Bnear se nebudou vyskytovat více než tři sousedící čtverce souřadnicové sítě, kde nebylo dosaženo detekce, a pět sousedících čtverců souřadnicové sítě, kde nebylo dosaženo detekce pro zóny Bfar a Bedge. Pro zónu Bside nejsou definovány žádné požadavky na sousedící prázdná pole.
Příloha A (normativní) Příklady
A.1 Příklady definic
A.1.1 Akustické informace a varování (audible information and warning)
Piezo-elektrický bzučák a elektromagnetický snímač jsou příklady akustických forem informací a výstražných zařízení. Obecně je akustické varování kódováno frekvencí, počtem opakování a polohou zvukového generátoru (akustický zdroj).
A.1.2 Vizuální informace a varování (visual information and warning)
Kontrolní žárovka a LED displej jsou příklady zařízení poskytující vizuální informace a varování. Obecně se vizuální varování kóduje frekvencí, počtem opakování, symboly, světlem nebo textem.
A.1.3 Dotekové informace a varování (tactile information and warning)
Pro tento způsob informování a varování řidiče se využívají například vibrační sedačky a pulzující brzdové pedály. Obecně je dotykový signál kódován intenzitou, frekvencí vibrování, velikostí a umístěním doteku (například na řidičovu ruku či nohu).
A.1.4 Úrovně varování (warning levels)
Úroveň varování je dána například intenzitou vibrování (nízké až silné vibrace) a kolísáním hlasitosti (nízká až vysoká). Obecně je úroveň varování kódována změnami ve frekvenci, intenzitě, hlasitosti, počtu opakování a barvě.
A.2 Příklady zkušebních postupů
V této části přílohy jsou uvedeny příklady zkušebních postupů pro dynamické a přítomnostní varování.