
ISO TR 20545 - Inteligentní dopravní systémy – Varovné a řídicí systémy vozidla / pozemní komunikace – Zpráva o standardizaci automatizovaných řídicích systémů vozidel (RoVAS) / Asistenční systémy nad rámec kontroly řidičem
Aplikační oblast: Varovné a kontrolní systémy ve vozidle a na pozemní komunikaci
Rok vydání normy a počet stran: Vydána 2017, 15 stran
Rok zpracování extraktu: 2017
Skupina témat: inteligentní dopravní systémy
Téma normy: vozidlové autonomní systémy řízení
Charakteristika tématu: obecný; popis (potenciálních standardizačních aktivit)
popis stávajících systémů
koncepce rozvoje autonomních systémů
způsob tvorby nových pracovních položek ISO/TC204/
klasifikace systémů s ohledem na jejich funkci specifikace HMI rozhraní
stavový diagram funkční architektury
Úvod
Technická zpráva 20545 vznikla z potřeby reagovat na rychlý vývoj v oblasti technologie senzorů a výpočetní techniky. Automobilový průmysl zavádí a bude v budoucnosti zavádět řadu systémů podporujících automatizovanou jízdu a pro jejich správné nasazení je nutné jasně vymezit funkce vozidla a roli řidiče. Za tímto účelem by měla být vytvořena řada mezinárodních norem, nicméně z dnešního pohledu není zcela jasné, které z konkrétních položek mají být standardizovány. Technická zpráva 20545 (dále i popisovaný dokument) systematicky uvádí oblasti a položky možné standardizace pro různé automatické systémy vozidel. Cílem popisovaného dokumentu je mj. pokrýt požadavky na standardizaci systémů pro automatickou jízdu v podmínkách smíšeného provozu (kde nejsou všechna vozidla automatická). Popisovaný dokument nestanoví oblasti, kde bude standardizace provedena, ani nedává doporučení na konkrétní normy jednotlivých dílčích systémů.
Užití
Popisovaný dokument je určen pro ty, kdo vytvářejí normy pro systémy automatizované jízdy automobilů. Dokument je zamýšlen pro následující užití: sdílení společného vnímání potřeb standardizace, ujasnění perspektiv standardizace, výběr položek standardizace, odhad pokrytí a priorit těchto položek a zvážení budoucího vývoje technologií a produktů.
1. Předmět normy
Dokument uvádí výsledky úvah nad potenciálními oblastmi a položkami standardizace pro systémy automatizované jízdy. Potenciální standardizační oblasti a položky byly vybrány s velkou šíří záběru a seřazeny systematickým způsobem tak, aby byl patrný potenciál standardizace pro rozličné systémy automatizované jízdy. Kdy, co a kým by měly být tyto aktivity vykonány, není předmětem dokumentu.
2. Souvisící normy
Dokument nepředkládá.
2 Přehled potenciálních oblastí standardizace
2.1 Principy
Tento článek je rozčleněn do tří hlavních oblastí, které jsou řešeny v podkapitolách, a sice: problematika architektur, problematika aktivit a problematika ostatních potenciálních oblastí standardizace.
2.1.2 Problematika architektur
2.1.2.1 Obecné
Předpokládá se, že tyto oblasti budou dále pokryty normami pro každou jednotlivou entitu, pro rozhraní mezi entitami a pro funkční přechody mezi nimi.
2.1.2.2 Funkční architektura
Článek ukazuje hypotetickou funkční architekturu systému. Jako příklad je použit automatický systém řízení vozidla, který je zobrazen diagramem na obrázku 1 (Figure 1 v originále). Funkce systému je popsána takto: Za normálních podmínek rozpoznává řidič jízdní prostředí (S1:ON) a řídí vozidlo (S5:ON). Při automatizované jízdě je řízení svěřeno vozidlovému systému (S4:ON). Dodatečně systém sděluje svůj stav řidiči, který může jeho funkci přizpůsobovat dle potřeby (S2:ON). Vozidlo může být řízeno jak řidičem, tak automatizovaným vozidlovým systémem (S4:On a S5:ON). Za podmínek automatizované jízdy není žádný důvod, aby se řidič musel účastnit procesu řízení. Nemusí sledovat okolí (S1:OFF) ani monitorovat žádný ze systémů vozidla (S2:OFF). Alternativně jsou definovány dva módy automatizovaného řízení – nepropojený (autonomní) typ a propojený (connected) typ. Nepropojený typ nekomunikuje s infrastrukturou ani s jinými vozidly (S2:OFF), zatímco propojený typ komunikuje s infrastrukturou a/nebo jinými vozidly, kterým také předává své vlastní informace.
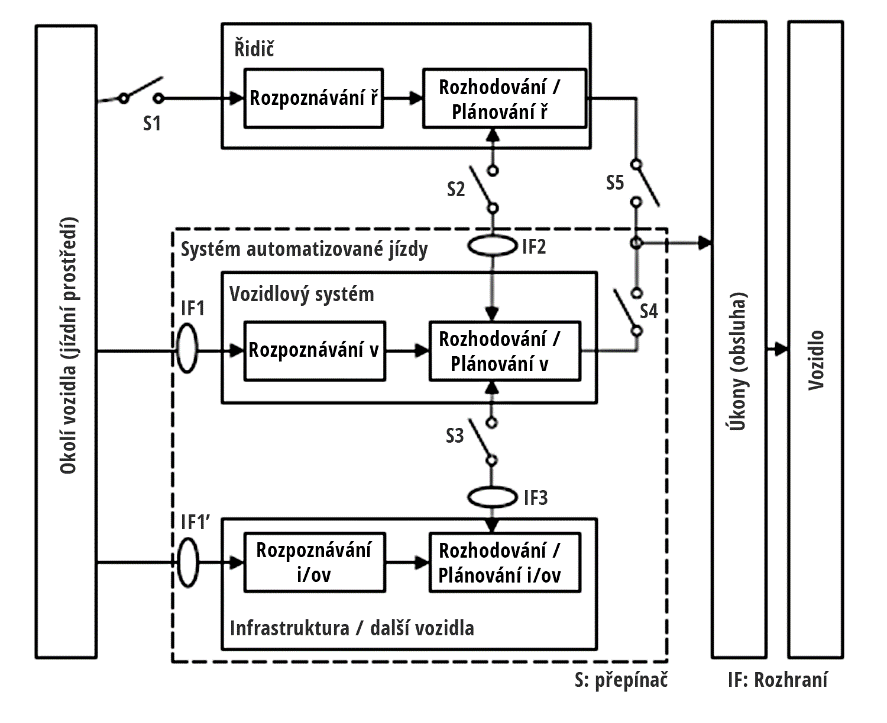
Může se stát, že bude potřebné vytvořit normu pro funkční požadavky na rozpoznávání, rozhodování, plánování, či požadavky na rozhraní mezi jednotlivými prvky, dále normy pro návrh automatizovaných vozidlových řídicích systémů, které budou schopny se adaptovat na změny přepínačů (S1 – S3).
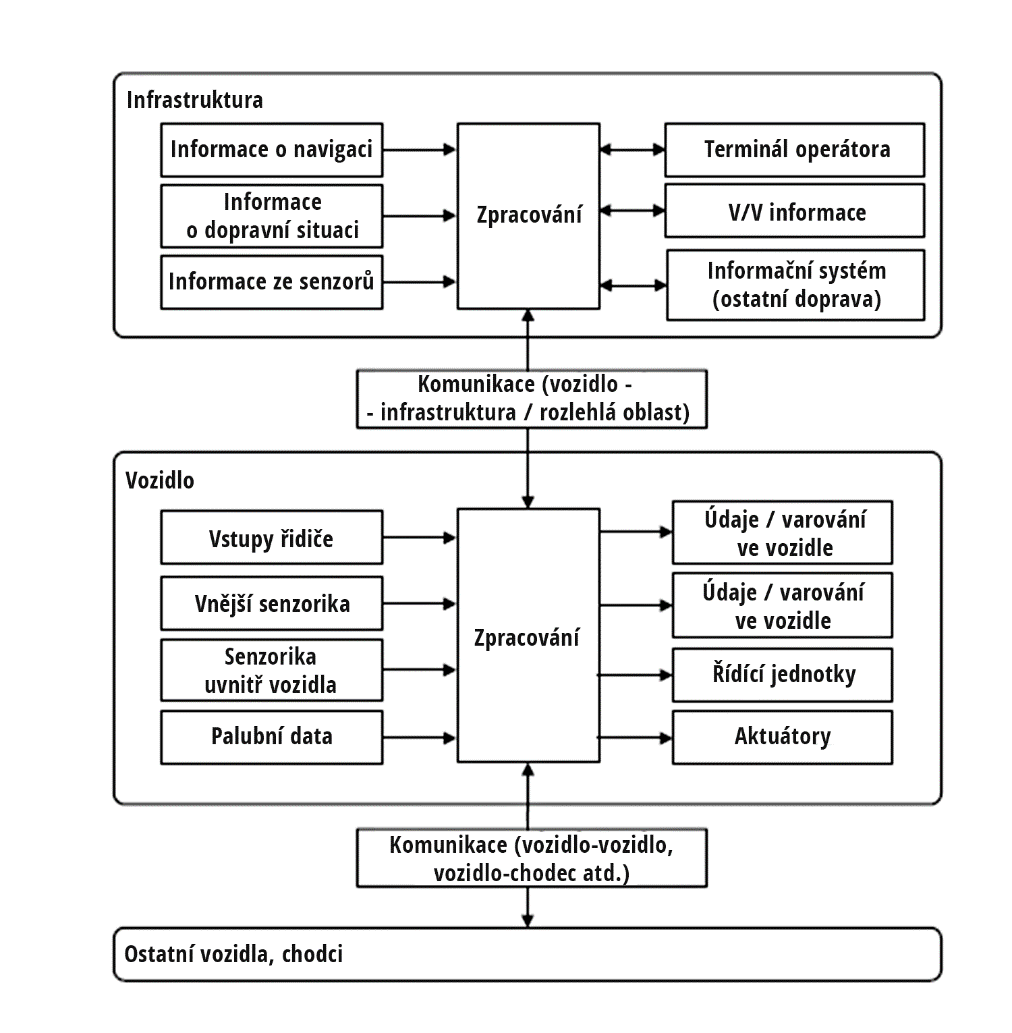
2.1.2.3 Fyzická architektura
Článek ukazuje hypotetickou fyzickou architekturu systému. Příklad ilustruje obrázek 2 (Figure 2 v popisovaném dokumentu). Protože fyzická architektura a její funkce mohou být rozličné v závislosti na konkrétní implementaci systému, nejsou specifikace fyzických prvků a jejich norem předmětem tohoto dokumentu.
2.1.4 Problematika aktivit
Aktivity spojené se standardizací v oblasti automatizovaných systémů řízení jsou v příloze A.
2.1.5 Další důležitá problematika automatizovaných systémů řízení vozidla
Je třeba vzít v úvahu, že existuje řada dalších důležitých standardizačních položek, které předkládané architektury nezahrnují.
2.2 Návrhy položek pro standardizaci
2.2.1 Klasifikace
V této sekci jsou potenciální oblasti standardizace rozděleny do tří kategorií: společné položky, základní funkční požadavky a další položky.
Pozn.: Položky se odkazují na přílohu B.
2.2.2 Společné položky
A) Terminologie – vzhledem k tomu, že automatizované systémy řízení jsou v současné době velmi široce diskutovaným tématem v mnoha zemích a zatím neexistuje jednotný mezinárodní standard pro jejich terminologii, je v různých odborných skupinách používána nejednotně a často s překrývajícím se nebo různým významem.
B) Úrovně automatizace – jak je uvedeno v příloze A6, definovala řada institucí (SAE, NHTSA, BASt) úrovně automatizace. Ovšem jejich definice a kritéria nejsou shodné. Definice úrovně automatizace jsou založeny na následujících prvcích:
předmět řízení
rozdělení pravomocí mezi řidiče a systém
provozní prostředí (doba, místo, počasí, stav vozovky atd.)
C) Referenční architektura automatizovaného systému řízení – existuje řada systémů, které mohou být nasazeny pro automatizovanou jízdu. Potenciální oblastí standardizace může být též obecné porozumění těmto systémům. Definování referenční architektury by bylo užitečné především pro diskuzi nad možnými funkcemi těchto systémů.
2.2.3 Základní funkční požadavky
A) Systémové požadavky pro každou z automatizačních úrovní – tyto požadavky pro každou úroveň mohou zahrnovat rozpoznávání, rozhodování a plánování a požadavky na podmínky, přepínání S1, S2 a S3 (viz obrázek 1) (např. rozpoznávání stavu jízdy – pozice vozidla, kongesce)
B) Rozdělení funkcí mezi systém a řidiče pro každou z automatizačních úrovní – to se týká IF2 mezi řidičem a vozidlovým systémem v hypotetické funkční architektuře na obr. 1 (např. požadavky na monitorování/odhad řidičova stavu apod.)
C) Požadavky týkající se přechodu řízení mezi řidičem a systémem na každé z automatizačních úrovní – jedná se o podmínky přepínačů S1, S2, S4 a S5 a rozhraní IF2 na hypotetické funkční architektuře na obrázku 1 (například standardizace informací podávaných systémem, HMI apod.)
D) Požadavky týkající se přechodu systému mezi jednotlivými automatizačními úrovněmi – jedná se o přepínače S1, S2, S4 a S5 a IF2 na hypotetické funkční architektuře na obrázku 1 (například standardizace informací podávaných systémem, HMI apod.)
E) Požadavky spojené s případem selhání systému na každé z automatizačních úrovní – zahrnují rozhraní IF2 a přepínače S1 a S2 a přechodové podmínky pro S4 a S5 na obrázku 1.
F) Požadavky V2X pro kooperativní systémy – zahrnuje rozhraní IF3 mezi vozidlem a infrastrukturou a ostatními vozidly za předpokladu, že přepínač S3 je ve stavu ON. Komunikace V2X se vyžaduje např. při automatizovaném parkování, kde není nezbytné, aby lidský řidič seděl uvnitř vozidla, ale stačí, aby toto monitoroval z vnějšku (např. požadavky na soubory zpráv, data, zpoždění, kapacity atd.)
G) Základní koncepty využívající kombinaci informací přicházejících ze senzoru vlastního vozidla a V2X komunikace. Vozidlo kooperuje s vnější infrastrukturou nebo ostatními vozidly, jestliže přepínač S3 je ve stavu ON (obrázek 1). V případě inkonzistence mezi informacemi přijímanými ze senzorů vlastního vozidla a komunikace V2X, je třeba zavést přístupy pro fúzi dat, váhování informací apod. Tyto mohou být samostatným předmětem standardizace.
2.2.4 Ostatní položky
A) Požadavky na spolehlivost – je třeba standardizovat např.: toleranci chyb, odolnost proti poruše, odolnost proti hlouposti.
B) Požadavky na bezpečnost – jsou to například datová bezpečnost, kyberbezpečnost apod.
C) Požadavky na snímání dat událostí – např. otázky jaká data, za jakých okolností a jakým způsobem snímat a uchovávat.
D) Zkušební postupy – zahrnují např. standardizované testovací scénáře, bezpečnostní analýzu, analýzu rizik atd.
E) Požadavky na standardy ve vztahu k certifikaci – např. kompatibilita systému s infrastrukturou, diagnostika, povolení k užívání automatizovaných vozidel na různých typech komunikací.
F) Viditelná rozhraní pro komunikaci s ostatními vozidly a chodci – protože je chování automatem řízeného vozidla v řadě aspektů rozdílné, musí být ostatním lidským účastníkům provozu sdělováno/zobrazováno vhodným způsobem tak, aby na něj mohli reagovat obdobně jako v případě vozidel řízených člověkem.
Pozn.: Příklady obdobných položek jsou uvedeny v příloze C.
5 Přístup ke standardizaci
5.1 Normalizační organizace
Normy s tématem automatizované jízdy vyvíjejí následující organizace: ETSI a SAE, skupina ISO/TC204 bude aktivně pracovat na normalizačních aktivitách v oblasti automatizované jízdy silničních vozidel.
5.2 Priority
Prioritně by se měla podpořit standardizace v následujících směrech:
zdůraznění společných a obecných položek, jako jsou termíny a definice a automatizační úrovně,
položky (systémy), u kterých se očekává jejich představení v brzké době.
Příloha A – Aktivity vztažené k normám pro automatizovanou jízdu vozidel
Tato příloha podává přehled aktivit týkajících se systémů pro automatizovanou jízdu rozdělených geograficky do čtyř podkapitol – Severní Amerika, Evropa, region Asie-Pacifik a další aktivity ve světě. Další podkapitolou je souhrn různých přístupů k definování úrovní automatizace jízdy („automated driving systems / levels“).
Příloha B – Mapování a tabulka potenciálních položek standardizace
Tato příloha uvádí tabulku různých položek a témat pro standardizaci, postavených vůči jednotlivým úrovním automatizace. Vychází z výčtu uvedeného v kapitole 2.2 (včetně příkladů užití).
Příloha C – Příklady užitečných potenciálních standardizovaných položek z kapitoly 2.2.4
Tuto přílohu tvoří tabulka vycházející z kapitoly 2.2.4.