
ISO/TR 21959-1 - Silniční vozidla – Výkon a stav člověka v kontextu automatizované jízdy: Část 1 -Společné základní koncepce
Aplikační oblast: Varovné a kontrolní systémy ve vozidle a na pozemní komunikaci, Rozhraní člověk-stroj
Rok vydání normy a počet stran: Vydána 2020, 24 stran
Rok zpracování extraktu: 2020
Skupina témat: Ergonomie uživatelských rozhraní systémů automobilů
Téma normy: Automatizované řízení silničních vozidel
Charakteristika tématu: Soubor konceptů a definic fungování řidiče v kontextu různých stupňů automatizované jízdy
Definice konceptů interakce řidiče s automatizovaným vozidlem na různých stupních automatizované jízdy
Diagramy funkcí, definice prvků a jejich rolí, soubor různých aspektů, které jsou klíčové pro realizaci a fungování automatizovaných vozidel.
Úvod
Přestože je rozvoj v oblasti automatizovaných systémů jízdy velmi rychlý, počítá většina úrovní automatizace jízdy (tak, jak je definovaly normativní dokumenty – např. SAE 3016), s větší či menší mírou zapojení člověka do procesu řízení. Ať se již jedná o nižší úrovně automatizace, kde se člověk řízení přímo účastní, nebo střední, kde může být k řízení vyzván, či jej sám iniciuje ve chvílích, kdy automat nemá dostatečné schopnosti bezpečně vozidlo řídit, nebo u vyšších stupňů musí být připraven převzít řízení v nouzové situaci, je to právě lidský faktor, na který je třeba brát ohled obdobně, jako tomu je u „tradičního“ způsobu řízení. Aspekty této problematiky jsou pomocí tzv. konceptů prezentovány tak, aby umožnily snadnější pochopení, modelování a analýzy a případnou evaluaci zapojení lidského faktoru řidiče tak, jak jsou v dokumentu systematicky definovány.
Poznámka: Extrakt uvádí vybrané kapitoly popisovaného dokumentu a přejímá původní číslování kapitol.
Užití
Dokument slouží návrhářům a výrobcům systémů automatizovaných automobilů (a tvůrcům uživatelské dokumentace/manuálů, výukových materiálů apod.), dále těm, kteří ověřují a zkoušejí jejich funkce, případně tvůrcům další legislativy.
1. Předmět normy
Dokument představuje základní společné koncepty v souvislosti se stavem a výkonem řidiče v kontextu automatizované jízdy. Dokument je relevantní pro všechny úrovně automatizace řízení, u kterého se vyžaduje přímo zapojení lidského řidiče, nebo jeho připravenost pro řešení nouzových situací/stavů (úrovně 1, 2 a 3 dle SAE). Je též využitelný ve spojitosti s vyššími úrovněmi automatizace, je-li umožněn přechod na manuální řízení (tedy úrovně 1-5 dle SAE).
Tyto koncepty mají sloužit jako základ pro metody posuzování a evaluaci vlivu lidského faktoru, a to jak na simulátorech, testovacích polygonech, tak na veřejných cestách. Jsou určeny pro vozidla všech kategorií. Jsou zde jak koncepty, u kterých bylo po technické stránce dosaženo společného pojetí, tak naopak i koncepty zatím diskutabilní, kde je třeba dalšího a hlubšího výzkumu.
Obsah tohoto dokumentu má více informativní než normativní charakter.
2. Souvisící normy
Dokument v této neadresuje žádné jiné normativní dokumenty, nicméně v textu a bibliografii se odvolává na následující:
- ISO 15007-1:2014, Road vehicles — Measurement of driver visual behaviour with respect to transport information and control systems — Part 1: Definitions and parameters
- ISO 17488:2016, Road vehicles — Transport information and control systems —Detection-Response Task (DRT) for assessing attentional effects of cognitive load in driving
- SAE J3016, Surface Vehicle Recommended Practice, Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles, 2016
- SAE J2944, Surface Vehicle Recommended Practice, Operational Definitions of Driving Performance Measures and Statistics, 2015
- SAE J3114, Human Factors Definitions for Automated Driving and Related Research Topics, 2016
- IEC 60050, Dependability and quality of service — Part 1 Dependability-common terms
3. Termíny a definice
Dokument v této kapitole žádné termíny neobsahuje (zde je uvede výběr termínů extraktu). Další kapitoly, které se věnují jednotlivým bodům popisované problematiky, jsou uvedeny předmětnými odbornými termíny a kolokacemi, které jsou v kapitole vysvětleny a dále užívány (tvoří vlastně základ koncepce popisovaného dokumentu).
automatizované řízení/jízda (Automated driving) – fáze, při které jsou aktivovány funkce automatizovaného řízení dle odpovídající úrovně (SAE úroveň 1-5)
manuální řízení (Manual control) – základní stav, kdy úkony řízení jsou v rukou řidiče (dle SAE úroveň 0).
výzva k zásahu (Request to Intervene - RtI) – tuto výzvu vydá adekvátním způsobem automatizovaný systém řízení v případě, že dojde k nenadálé události, nebo k překročení jeho funkčních limitů
převzetí řízení řidičem (Control Take-Over by Driver) – převzetí řízení od systému automatizované jízdy do rukou lidského řidiče (obvykle na výzvu systému, při selhání systému, či z řidičovy vlastní vůle při určitých stupních automatizované jízdy)
4 Účel normy
Tato kapitola ve zkratce vysvětluje účel, za kterým byla norma vytvořena, a naopak se vymezuje k tomu, co není jejím účelem, byť by to čtenář mohl očekávat (např. nedefinuje návrh HMI, může ale sloužit jako pomoc při jeho zkoušení apod.). Také upozorňuje, že nenabízí žádná technická doporučení k návrhu a realizaci jednotlivých systémů automatizované jízdy.
5 Výkon člověka (řidiče) v kontextu automatizované jízdy
Tato kapitola na 8 stranách definuje a shrnuje modely a koncepty převzetí řízení, a to za pomoci termínů a definic.
5.1 Obecně
Výkon řidiče je řešen ve dvou následujících aspektech – chování jakožto prostředku a jeho důsledků jakožto vyústění. Důraz na možné důsledky je kladen zejména na chování řidiče při procesu přechodu od manuálního řízení (L0) a nazpět. Obdobně je tomu u přechodu z jedné úrovně automatizované jízdy na jinou. Kapitola jako celek se věnuje jednotlivým případům. Každý případ (podkapitola) obsahuje články s definicemi pojmů a kolokací (jejich vysvětlení a případně příklady), pomocí kterých se vymezují principy daného procesu/přechodu/modelu.
5.2 Přechod z manuálního k automatickému řízení
5.2.1 Model procesu přechodu
Obrázek 1 ilustruje model procesu přechodu z manuálního řízení vozidla k automatizovanému, který byl iniciován buďto řidičem nebo systémem. Příkladem je „dálniční pilot“ (Highway Pilot).
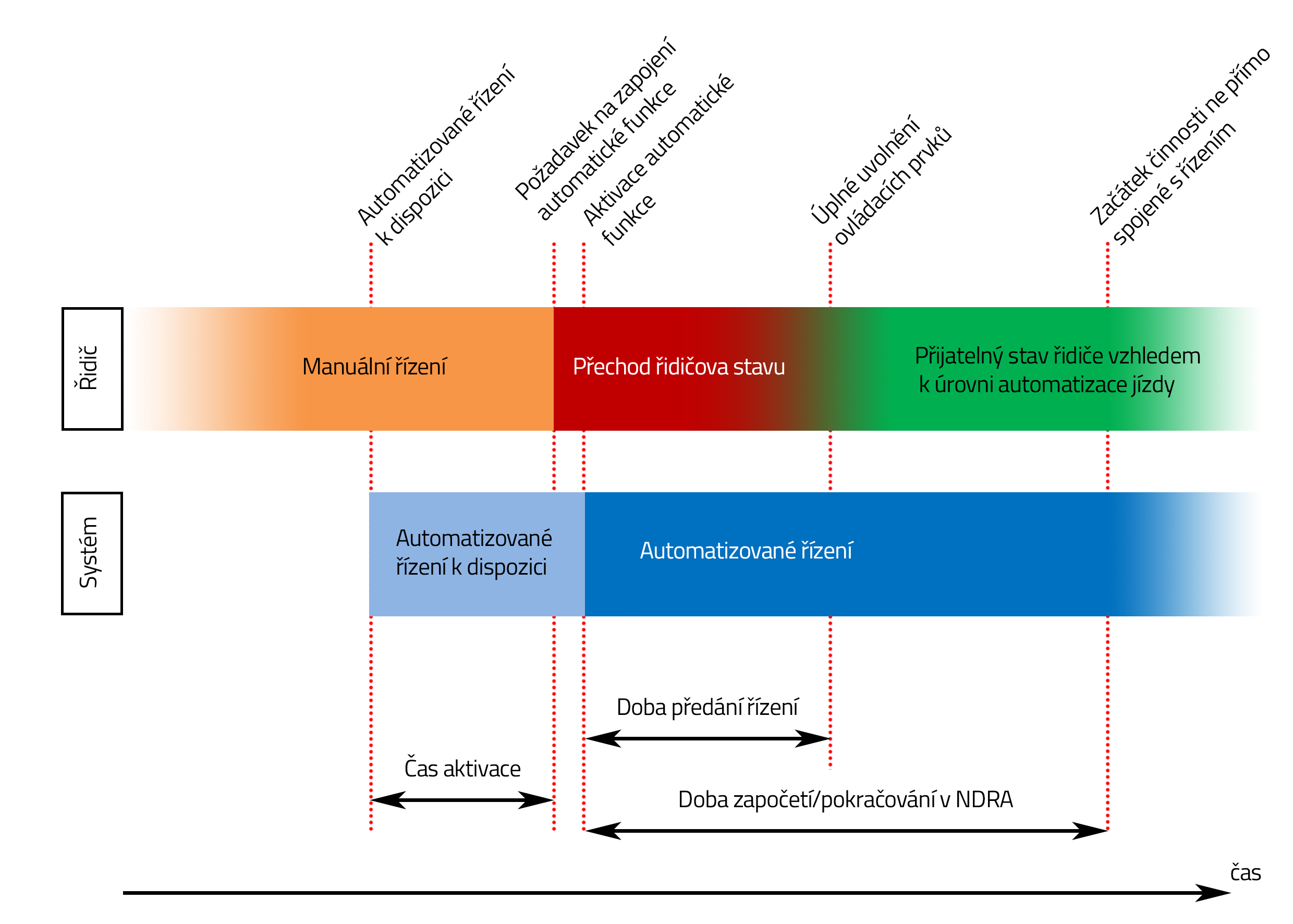 Obrázek 1 - Řidičem/systémem iniciovaný přechod z manuálního na automatizované řízení (Figure 1 v popisovaném dokumentu)
Obrázek 1 - Řidičem/systémem iniciovaný přechod z manuálního na automatizované řízení (Figure 1 v popisovaném dokumentu)
5.2.2 Definice souvisící s konceptem
Kapitola uvádí 10 definic.
- Manuální řízení (Manual control) – základní stav, kdy úkony řízení jsou v rukou řidiče (dle SAE úroveň 0).
- Automatizované řízení k dispozici (Automation available)
- Požadavek na zapojení automatické funkce (Request to engage automation)
- Aktivace automatické funkce (Activation of automation)
- Přechod řidičova stavu (Driver state transition) – proces, kdy řidič předává řízení automatu.
- Automatizované řízení/jízda (Automated driving) – fáze, při které jsou aktivovány funkce automatizovaného řízení dle odpovídající úrovně (SAE úroveň 1-5).
- Přijatelný stav řidiče vzhledem k úrovni automatizace jízdy (Acceptable driver state by automation level) – popis stavu (činností, pozice, pozornosti) řidiče, který je vyžadován při užívání systému dané úrovně automatizace.
- Činnost ne přímo spojená s řízením (Non-Driving Related Activity – NDRA)
- Úkol ne přímo spojený s řízením (Non-Driving Related Task – NDRT) – může být řadou činností NDRA.
5.2.3 Veličiny pro měření lidského (řidičova) výkonu v průběhu předání řízení automatu
Kapitola uvádí následující definice:
- Doba aktivace systému (Time to activate system) – čas mezi „Automatizované řízení k dispozici“ a „Aktivace automatické funkce“.
- Doba předání řízení (Time to release control) – čas mezi „Aktivace automatické funkce“ a „Plné předání řízení“.
- Doba započetí/pokračování v NDRA (Time to start/resume NDRA) – čas mezi „Aktivace automatické funkce“ a „započetí NDRA“.
- Metoda užitá k zapojení systému automatizovaného řízení (Method used to engage driving automation system) – specifikace požadovaných akcí, které musí řidič vykonat k zapojení systému.
5.3 Přechod z automatického k manuálnímu řízení
Kapitola uvádí a na diagramech ilustruje modely přechodů za různých podmínek.
5.3.1 Model procesu přechodu
Obrázek 2 ilustruje model procesu přechodu z automatického k manuálnímu řízení, který byl iniciován buďto řidičem nebo systémem.
Příkladem je selhání dálničního pilota interní chybou systému a vynucení si plného předání řízení řidiči z automatického k manuálnímu řízení (Obrázek 2).
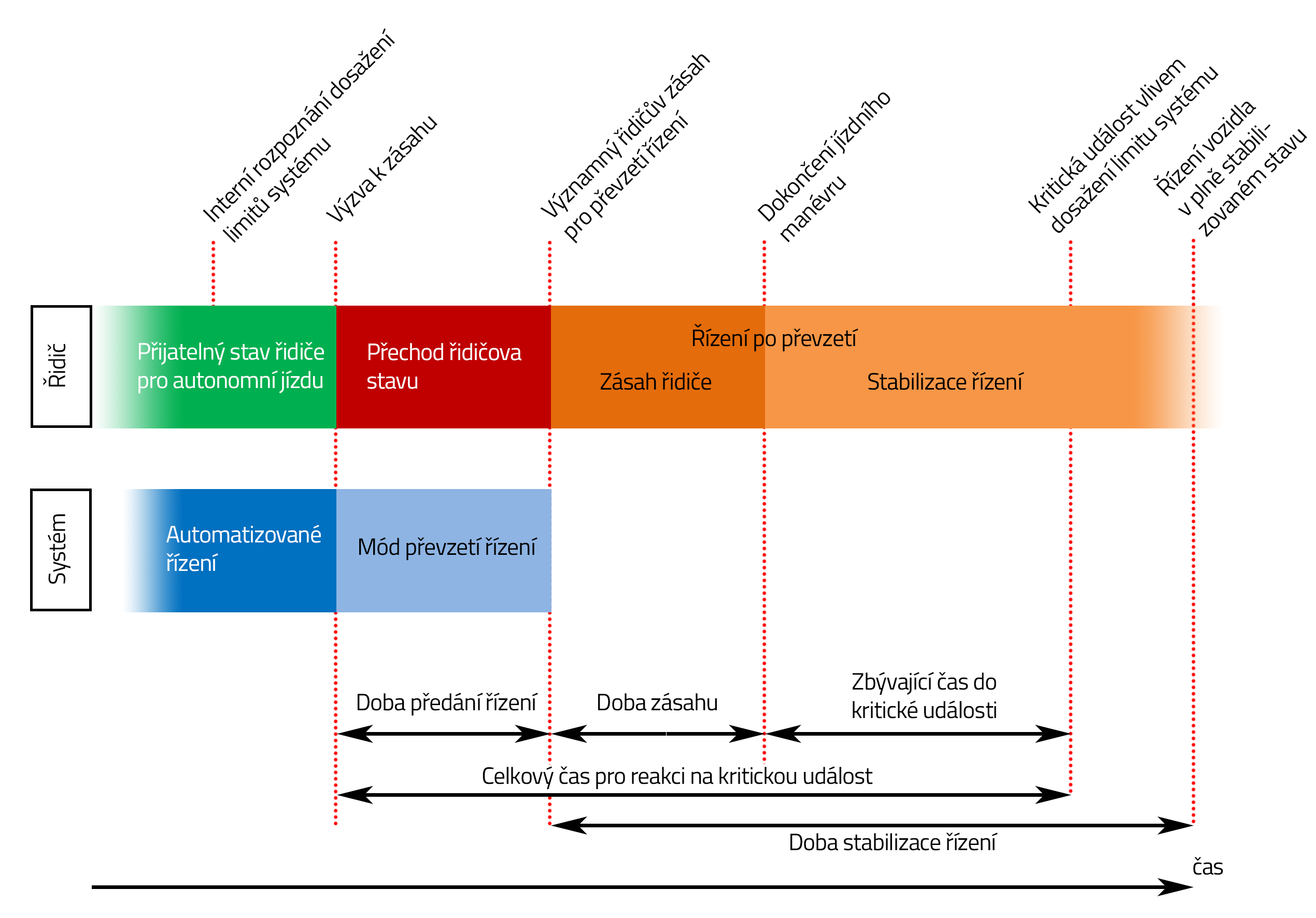
Obrázek 2. Systémem iniciovaný přechod z automatického k manuálnímu řízení (Figure 2 v popisovaném dokumentu)
Jiný případ takového přechodu je zapříčiněn dosažením (a detekcí) funkčního limitu systému (Obrázek 3 – Figure 3 v popisovaném dokumentu) – příklad může být nenadálá absence podélného značení na vozovce, pomocí kterého systém určuje svůj jízdní pruh. Řidič tuto situaci vyhodnotí jako nutnou k převzetí řízení.
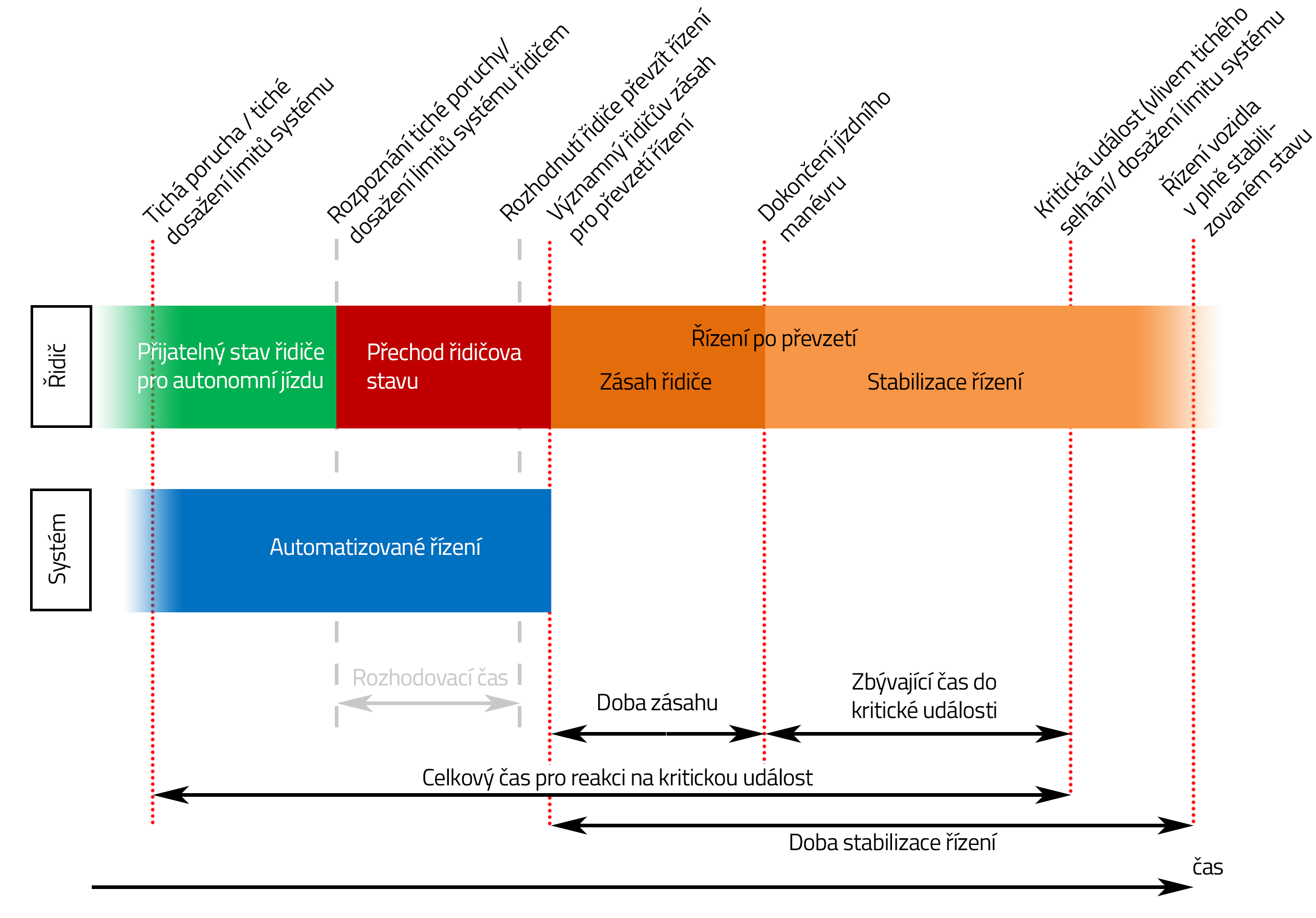
Obrázek 3. Řidičem iniciovaný přechod z automatického k manuálnímu řízení z důvodu dosažení funkčních limitů systému
Dalším případ je shodný s předchozím, nicméně důvod přechodu není v limitaci systému, ale závisí na řidičově vůli (například sjezd z dálnice na odpočívadlo). Tento případ je opět ilustrován obrázkem velmi podobným předchozí situaci (Figure 4 v popisovaném dokumentu).
5.3.2 Definice souvisící s konceptem
Kapitola uvádí následujících 9 definic:
- Výzva k zásahu (Request to Intervene - RtI) – tuto výzvu vydá adekvátním způsobem automatizovaný systém řízení v případě, že dojde k nenadálé události, nebo k překročení jeho funkčních limitů.
- Tichá porucha / tiché překročení limitu (Silent system failure and/or silent system limit) – chybový stav, který není systémem rozpoznán a není komunikován s řidičem.
- Kritická událost vlivem dosažení limitu systému (Critical event due to system limit) – situace, kterou systém neumí řešit bezpečně a která nastane, pokud řidič nezasáhne.
- Mód převzetí řízení (Take-over mode) – koncept popisující chování systému poté, co je vystaven signál „Výzva k zásahu“ řidiči. Detailně toto popisuje ISO/TR 21959-2.
- Změna stavu řidiče (Driver state transition) – proces změny na očekávaný funkční stav řidiče (např. při převzetí řízení)
- Významný řidičův zásah (Significant driver intervention) – obvykle za účelem řidičem iniciovaného převzetí řízení
- Řízení po převzetí (Post transition (manual) control) – definované časové okno, ve kterém řidič přejímá řízení a stabilizuje jízdu do normálu.
- Dokončení jízdního manévru (Completion of driving manoeuver)
- Řízení vozidla v plně stabilizovaném stavu (Vehicle control fully stabilized) – obvykle nastane po úspěšném dokončení jízdního manévru a/nebo po úspěšném převzetí řízení.
5.3.3 Veličiny pro měření lidského (řidičova) výkonu při převzetí řízení od automatu
V této podkapitole jsou v následujících odstavcích popsány různé aspekty problematiky zpětného převzetí řízení řidičem:
Povaha řidičova zásahu – jsou to brzdění, zrychlováni, zásah na volantu, manipulace specifickým ovládacím prvkem a další. Rozlišuje se i pořadí jednotlivých zásahů.
Veličiny spojené s časovými nároky – jsou to časy nutné k jednotlivým procesům – jako je doba převzetí řízení (první reakce, vizuální reorientace, vizuální fixace na vozovku, vizuální fixace na zprávu o výzvě k převzetí řízení, přesun nohy na brzdu, plyn atd.), doba deaktivace, doba rozhodování, doba zásahu, celkový časový „rozpočet“, čas zotavení (tj. nastavení systému do stavu „standardní jízdy“) atd.
Veličiny spojené s kvalitou jízdy – tyto veličiny jsou odvozené z metrik používaných při hodnocení řidičova výkonu například při distrakci, únavě, zátěži apod. Často jsou získávány subjektivní metodou, jako je sebehodnocení, expertní hodnocení nebo objektivními metodami spojenými s vyhodnocováním řidičských chyb, či vyhodnocováním jízdy z hlediska plynulosti a bezpečnosti.
6 Stavy člověka (řidiče) v kontextu automatizované jízdy
Tato kapitola na 5 stranách rozebírá koncepty stavu člověka (v roli řidiče/operátora).
6.1 Obecně
Kapitola 6 definuje a shrnuje koncepty stavu řidiče za pomoci termínů a definic, obdobně jako je tomu v rámci kapitoly 5.
6.2 Obecné koncepty mentálních stavů řidiče ve vztahu k problematice automatizované jízdy
Tyto koncepty se soustředí na kognitivní podstatu fungování lidského řidiče. Jsou obdobné jako v případě hodnocení řidičova výkonu v běžných (neautomatizovaných) podmínkách:
- Pozornost (Attention)
- Vyhrazení prostředků pozornosti (Attentional resource)
- Náročnost úkolu (Task demand)
6.3 Koncepty stavů řidiče ve vztahu k problematice automatizované jízdy
Tyto koncepty jsou definovány pro stavy řidiče, při kterých řidič monitoruje chod automatizovaného systému nebo okolní situaci (prostředí, provoz). Jsou to:
- Monitorování okolí, provozu (Monitoring the driving environment)
- Monitorování funkce automatizovaného systému řízení (Monitorování Monitoring the driving automation system performance)
- Detekce událostí a objektů a reakce na ně (Object and Event Detection and Response - OEDR)
- Vnímavost (Receptivity) – schopnost soustředit pozornost na určitý podnět
- Povědomí o aktuální situaci (Situation awareness) – míra, kterou si je řidič vědom aktuální situace, možných rizik a připravenosti k adekvátní reakci
- Bdělost (Vigilance) – udržení pozornosti/ostražitosti v delším časovém horizontu
- Povědomí o aktuálním módu řízení (Operating mode awareness) – míra povědomí, jakou řidič má o aktuálním způsobu řízení a jeho možnostech
- Povědomí o aktuálním režimu řízení (Operating state awareness) – míra povědomí, jakou řidič má o aktuálním automatizačním režimu (úrovně) řízení a jeho možnostech
6.4 Koncepty stavů řidiče ve vztahu k úkonům, které nejsou spojeny s řízením
Tyto koncepty jsou definovány pro stavy řidiče, které jsou mimo základní úkoly řízení. Opět jsou odvozeny od standardního posuzování řidičova výkonu při běžném, neautomatizovaném řízení.
- Vizuální distrakce/ zátěž (Visually distracted/loaded)
- Vizuálně manuální distrakce/zátěž (Visual-manually distracted/loaded) – vizuální zátěž spojená s manuálním výkonem.
- Manuální distrakce (Manually distracted/loaded)
- Kognitivní distrakce/zátěž (Cognitively distracted/loaded)
- Zasnění se (Mind wandering) – únik pozornosti řidiče od primárních úkolů řízení k vnitřním myšlenkám.
- Úroveň bdělosti (Arousal level)
- Motivace k činnostem mimo úkoly řízení (Motivation to non-driving task) – v případě automatizované jízdy se řidič může věnovat činnostem, které nesouvisí s řízením vozidla a může mít tendence v nich prioritně pokračovat na úkor nutných řidičských zásahů i přes výzvu systému.
- Ruce na volantu (Hands on the steering wheel)
- Ruce mimo volant (Hands off the steering wheel)
- Plné ruce (Hands occupied) – řidič při automatické jízdě drží v rukou jiné předměty a není okamžitě schopen převzít řízení.
- Pozice nohou (Foot position)
- Pozice „mimo řízení“ (Out of driving position) – pozice v rámci automatizované jízdy, při které řidič není schopen převzít řízení (relaxace, přesednutí, otočení sedadla)
7 Připravenost / dostupnost řidiče
Problematika připravenosti (dostatek pozornosti – adekvátního smyslu, nejčastěji vizuální) a dostupnosti (ve smyslu aktuální dostupnosti a prostředků k provedení zásahu) řidiče je zde rozebrána na příkladech a ilustrována ukázkou rozdílu u systémů automatizace (SAE) úroveň 2 a 3 (obrázek Figure 5 v popisovaném dokumentu „Konceptuální model ¨řidičovy připravenosti / dostupnosti¨ při přechodu stavů“).
8 Řidičova praxe se systémy automatizované jízdy a ochota je používat
Tato kapitola představuje pohled na užívání systémů automatického řízení z hlediska uživatele. Řeší uživatelskou akceptaci, seznámení se a zkušenost uživatele s danými systémy. Tyto procesy, funkce a další aspekty znázorňuje poměrně rozsáhlý blokový diagram na obrázku Figure 6 v popisovaném dokumentu.
Z toto schématu pak dále vycházejí další podkapitoly (8.1-8.4), které pokrývají a za pomoci okomentovaných termínů definují následující aspekty:
- 8.1 Dřívější pohled na systémy (povědomí z médií a dalších zdrojů, očekávání)
- 8.2 Výuka a výcvik (vysvětlení principů, získání základních dovedností v jejich používání)
- 8.3 Porozumění systémům automatizovaného řízení uživatelem
- Pvědomí o tom, jak tyto systémy fungují
- Uživatelův mentální pstoj k systémům automatizovaného řízení
- 8.4 Užívání systémů automatizovaného řízení uživatelem
- Ochta uživatele používat tyto systémy automatizovaného řízení
- Interakce uživatele se systémy autmatizovaného řízení
- Způsb používání systémů automatizovaného řízení uživatelem
Bibliografie
Obsahuje celkem 73 odkazů, z nichž většina jsou odborné články (či obdobné vědecké publikace), dále relevantní výzkumné projekty (zprávy projektů) a 6 norem (ISO, SAE, IEC). Většinou jsou z oblastí, jako jsou interakce člověk-stroj, lidský faktor v dopravě či řízení, aplikovaná psychologie a hygiena a ergonomie práce.