Charakteristika
Kooperativní dopravní systémy jsou podmnožinou systémů ITS, ve kterých systémy a jednotlivé ITS stanice (tedy komunikační jednotky systému) navzájem komunikují za účelem sdílení informací a dat, které umožňují zvýšení bezpečnosti, plynulosti a udržitelnosti dopravy nad rámec běžných samostatných ITS systémů. Příkladem C-ITS je vzájemná komunikace vozidel, která při prudkém brzdění vysílají tuto informaci k ostatním vozidlům, při kolizi šíří informaci o dopravní nehodě nejen ve svém okolí, ale i do centrálního prvku systému, kde ji mohou přejímat další ITS, jako je dálniční dispečink, a jede-li k nehodě vozidlo IZS, může vysílat žádost o uvolnění prostoru vozidlu s právem přednosti v jízdě s předstihem, tak aby bylo minimalizováno jeho zdržení. Výměna informací však není omezena pouze na komunikaci mezi vozidly, ale naopak je cílem budování kooperativních systémů také zajištění přenosu dat z dopravní infrastruktury do vozidel. Příklady tohoto druhu komunikace jsou přenos stavu signálního plánu křižovatky do vozidla, preference vozidel MHD na světelně řízené křižovatce, přenos informace o dopravním značení do vozidla a další.
Za účelem vzájemného poskytování výše uvedených informací byl pro potřeby kooperativních systémů navržen a standardizován jednotný formát pro výměnu dat, tzv. C-ITS zprávy. Tyto zprávy odpovídají různým službám (např. CAM, DENM, IVI) a umožňují vysílat službami využívané informace. Přenosovými technologiemi pak jsou ITS-G5, LTE-V či mobilní komunikace dle návrhu, potřeb a možností daného kooperativního systému.
Popis řešené problematiky na vysoké úrovni
Základní myšlenkou kooperativních systémů je poskytnout řidiči vozidla, vozidlovému systému pro podporu řízení, či v budoucnu autonomnímu vozidlu informace, které by v izolovaném prostředí nebyly dostupné. Výše uvedený příklad prudkého brzdění je typickou příčinou dopravních nehod v hustém dopravním provozu na komunikacích dálničního typu. Bez použití kooperativního systému řidič vidí pouze před ním jedoucí vozidlo, případně několik dalších před ním, lidar pro podporu řízení (automatické brzdění) pak detekuje pouze vozidlo bezprostředně před sebou. V případě situace prudkého brzdění celé kolony vozidel (např. při nehodě) nemusí být tato informace o brzdění předchozího vozidla dostatečná a vznikají tzv. sekundární dopravní nehody. V případě využití kooperativních systému ve vozidlech při té samé situaci je možné informaci o prudkém brzdění začít vysílat ve stejné chvíli, kdy k situaci dojde, a to na vzdálenost několika set metrů. Blížící se vozidla či jejich řidiči tak mohou začít snižovat svou rychlost s předstihem a zabránit tak jinak nevyhnutelné nehodě.
Za účelem možnosti předání těchto informací je nutné, aby vozidla a případně dopravní infrastruktura v případě aplikací, kdy vozidla komunikují s infrastrukturou, byla vybavena C-ITS jednotkami. Vozidlové jednotky jsou běžně označovány jako OBU (On-Board Unit) a infrastrukturní jednotky jako RSU (Road Side Unit). Tyto jednotky obstarávají jak fyzickou výměnu dat, tak i logiku jejich zpracování. Za tímto účelem jsou vybaveny tzv. software stackem, jež na jednotlivých vrstvách referenčního modelu procesuje uvedenou výměnu informací od fyzické až po aplikační vrstvu. Ekosystém C-ITS pak je typicky doplněn centrálním prvkem systému, kde jsou shromažďovány a případně dále vyhodnocovány a znovu distribuovány informace související s dopravou, kde se ověřuje platnost vydaných certifikátů pro zabezpečení komunikace a podobně, který je zpravidla označován jako C-ITS Back Office.
Definice objektů
aplikace C-ITS – případ užití; implementace funkce služby C-ITS řešící konkrétní problém např. varování před jízdou na červenou
C-ITS – kooperativní systém, inteligentní dopravní systém, který vzájemně propojuje více systému nebo více ITS stanic za účelem sdílení dopravních dat a informací sloužících ke zvýšení bezpečnosti a plynulosti provozu
centrální stanice C-ITS – centrální prvek C-ITS plnící funkci sběru informací, jejich předávání a zajišťování dílčích částí po navazující řídící a informační systémy v obousměrné komunikaci.
ITS G5 – přístupová technologie; standard pro zajištění C-ITS komunikace využívající frekvenční pásma přidělená evropským inteligentním dopravním systémům dle ETSI EN 302 663
jednotka C-ITS – fyzická implementace ITS stanice
LTE-V, LTE-V2X – přístupová technologie; standard pro zajištění C-ITS komunikace využívající frekvenční pásma přidělená evropským inteligentním dopravním systémům dle ETSI EN 103 613
OBU – palubní jednotka; jednotka C-ITS umístěná ve vozidle a zajišťující přenos informací z okolního prostředí (od jiných vozidel či z infrastruktury) do vozidla a zároveň vysílání informací vlastních
RSU – jednotka na straně infrastruktury; jednotka C-ITS umístěná na straně dopravní infrastruktury, typicky řadiči SSZ, dálničním portálu apod.; zajišťuje vysílání informací pro vozidla a případně přeposílání informací na centrální prvek systému
služba C-ITS – vrstva softwarového balíku C-ITS stanice zajišťující generování, přijímání a zpracování určitého typu zpráv (dle typu služby)
stanice C-ITS – softwarová implementace ITS stanice odpovídající referenční architektuře dle ISO 21217; zajišťuje komunikaci a zpracování dat v ekosystému C-ITS, může se jednat o virtuální nebo fyzickou implementaci stanice
zpráva C-ITS – základní datová jednotka služby C-ITS
Architektura popisovaného řešení
Kooperativní inteligentní dopravní systémy spadají do oblasti dopravní telematiky se zaměřením na zvýšení bezpečnosti a plynulosti dopravy. Kooperativní systémy jsou podmnožinou systémů ITS, které komunikují a sdílejí informace mezi stanicemi ITS za účelem zvýšení bezpečnosti, udržitelnosti, účinnosti řízení dopravního provozu nad rámec jednotlivých samostatných systémů. Pro zabezpečení funkce kooperativního systému v oblasti ITS se využívá přímé komunikace mezi vozidlem a infrastrukturou (C2I) a/nebo přímé komunikace mezi vozidly (C2C). Obecně lze obě funkce označit C2X. Pro vlastní funkci kooperativního inteligentního dopravního systému (C-ITS) musí být ve vozidle umístěna palubní jednotka (OBU) a infrastruktura musí být vybavena jednotkou na straně infrastruktury (RSU), které vzájemně komunikují pomocí definovaného protokolu, popsaného příslušnými normami.
Rozdíl mezi ITS systémem a kooperativním ITS systémem (C-ITS) je ten, že C-ITS systém je založen na interakci mezi vozidly nebo mezi dalšími aktéry systému, pomocí které získává data, koná rozhodnutí, umožňuje či spíná funkci aktérů nebo naopak účastníkům data poskytuje.
Kooperace z hlediska C-ITS předpokládá spolupráci na úrovních:
- Přímé komunikace a výměny relevantních informací mezi aktéry.
- Dynamické interakce mezi účastníky silničního provozu, nebo mezi účastníky silničního provozu a dopravní infrastrukturou
- Sběru (anonymních) dat za účelem jejich využití ve prospěch účastníků silničního provozu (např. sběru dat z plovoucích vozidel).
C-ITS jako celek tedy je funkce, která umožňuje "kooperativní" výměnu dat s cílem poskytovat aplikační služby jednomu nebo více systémům a účastníkům systému.
C-ITS funguje v pěti různých režimech komunikace:
- Vozidlo – vozidlo;
- ITS stanice – ITS stanice;
- Vozidlo – aplikační služba;
- Komunikace s centrálním prvkem systému – back office;
- Komunikace mezi jádrem systému a jeho aplikacemi.
Uvedené body jsou z hlediska komunikace prakticky identické, nicméně mohou se lišit ve specifických požadavcích bezpečnostních aplikací (např. varování před kolizí), kde jsou pro komunikaci vozidlo-vozidlo stanoveny časové kritické požadavky, které se neuplatňují pro obecné ITS- stanice, v případě komunikace dle bodu c) mohou být poskytovány další služby v kontextu kooperativního systému (např. služby připojeného nekooperativního systému), bod d) je zásadní v případě zapojení provozovatele systému nebo jurisdikce, kdy je potřeba jejich povolení v rámci nějaké služby nebo v případě výběru poplatků za službu. Bodem e) je potom míněno, že přestože je možné, aby některé služby C-ITS byly poskytovány přímo v režimu vozidlo-vozidlo (například "Varování před náledím", "Varování předmět na vozovce" apod.), mohou být v mnoha případech účinněji poskytnuty, pokud detekční vozidlo předává data do jádra systému, kde jsou poskytnuty dalším aplikacím, které mohou rozšířit informační hodnotu daného varování a ostatní vozidla mohou být efektivněji a snáze varována, neboť detekující vozidle se v dané lokalitě nachází přechodně na rozdíl od systému, který může informaci poskytovat pro oblast neustále, dokud trvá.
Přehled funkcí popisovaného řešení
Níže uvedený obrázek ukazuje pohled na poskytování služeb C-ITS. Každý z prvků systému může být zároveň ITS stanicí, čímž odpovídá pěti vyjmenovaným režimům výše. ITS stanice tak leží nejen v centrálním systému, ale mohou být součástí ITS služeb i dalších komponent systému. ITS stanice mohou být připojeny přes celou řadu bezdrátových technologií nebo přímo přes internet (nejčastěji však na úrovni komunikace vozidlo-vozidlo nebo vozidlo-infrastruktura půjde o standard ITS G5). Ze schématu je zřejmé, že každá stanice může komunikovat a sdílet data s dalšími stanicemi v okolí, případně na základě těchto sdílených informací v jisté formě řídit dopravu či informovat uživatele systému. Je dále možné vytvářet paralelní struktury s několika centrálními systémy, které na sebe mohou či nemusí působit a vzájemně se ovlivňovat a kooperovat.
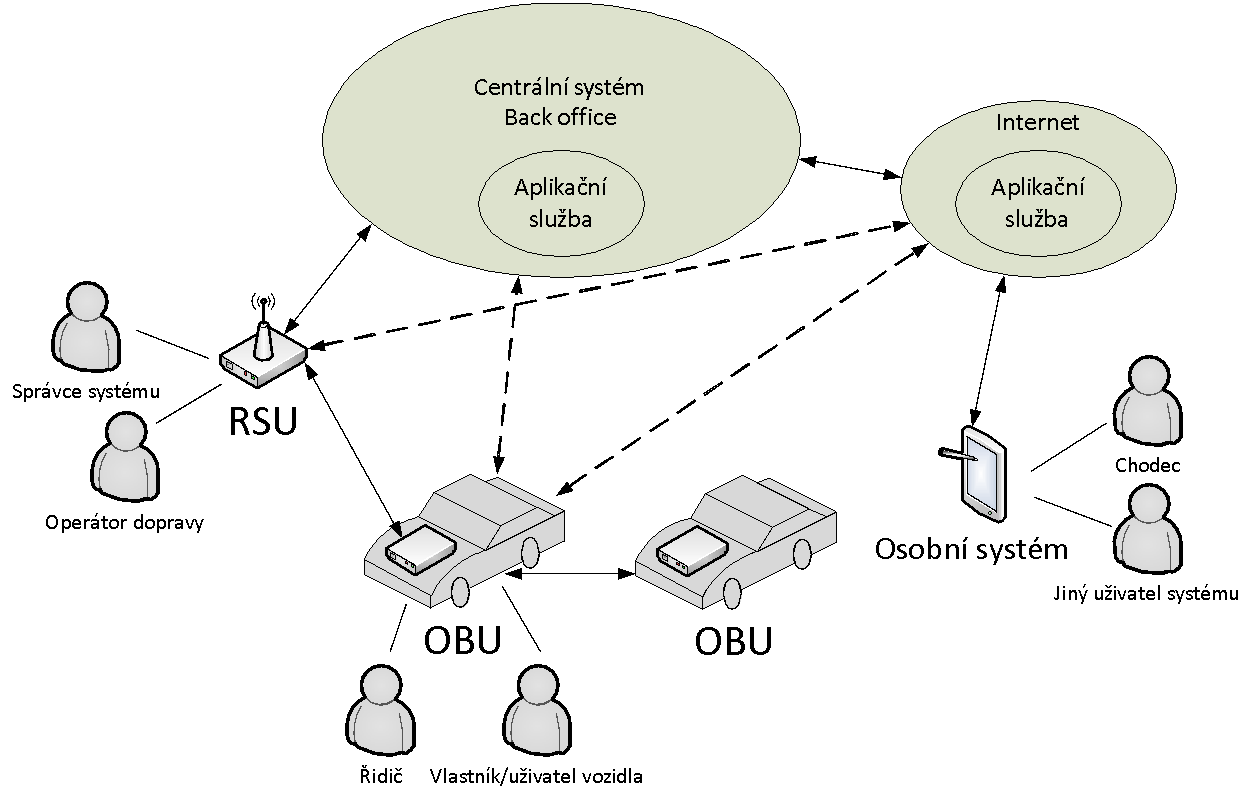
Hlavními komponentami systému jsou tedy:
- Aplikace, aplikační služby – které poskytují funkce zvýšení bezpečnosti, mobility a přínosu pro životní prostředí.
- Vybavená vozidla – vozidla vybavená OBU jednotkami a sběrem dat pro využití v C-ITS.
- Vybavená infrastruktura – dopravní infrastruktura vybavená jednotkami RSU sbírajícími a poskytujícími data ze systému C-ITS.
- Osobní systémy – mobilní telefony, tablety nebo zařízení s podobným typem komunikace a sběrem dat.
- Centrální systém – back office – systém zajišťující sběr, výměnu a zpravidla vyhodnocení dat z více ITS stanic a poskytující výstupy na ITS stanice.
- Komunikace – umožňuje fyzickou výměnu dat, včetně komunikace ITS-stanice, zpravidla prostřednictvím standardu ITS G5 a internetu.
- Podpůrné systémy – obsahují bezpečnostní pověření certifikačních a registračních autorit, které umožní zařízením a systémům navázat zabezpečené spojení.
Za použití výše uvedených komponent je pak kooperativní systém schopný zajišťovat svůj hlavní cíl, jímž jsou C-ITS aplikace, či jinak řečeno, případy užití. Jedná se o využití C-ITS služeb v konkrétních dopravních problémech nebo situacích, pro které kooperativní systémy přináší řešení. Každá z těchto aplikací používá pro výměnu informací jeden nebo více typů C-ITS zpráv, které jsou generovány a zpracovávány odpovídající C-ITS službou. C-ITS službou se rozumí softwarová implementace v C-ITS stanici, která z pohledu vysoké úrovně sdružuje obdobné funkce kooperativního systému (např. DEN služba zajišťuje funkce spojené s varováním, CA služba funkce spojené s vysíláním časoprostorových údajů o pohybu vozidla a IVI služba přenos informací z infrastruktury do vozidla).
C-ITS služba tedy zajišťuje vytvoření vysílané zprávy a zpracování přijaté zprávy. Obsah zprávy je pak daný potřebou dané aplikace. Rozdíl mezi dvěma aplikacemi využívající stejnou službu spočívá v obsahu použitých zpráv a vyplnění jejích rozdílných elementů či kontejnerů. Některé aplikace mohou též využívat více než jednu službu. Výčet aplikací implementovaných a testovaných v pilotním projektu C-ROADS CZ pak je pro názornost následující:
- Práce na silnici
- Přenos informací do vozidla
- Pomalé a stojící vozidlo
- Varování před železničním přejezdem
- Blížící se vozidlo IZS
- Varování před stojící kolonou
- Informace o stavu SSZ a varování před jízdou na červenou
- Preference vozidel MHD
- Varování před nebezpečnou lokalitou
- Varování před zhoršenými povětrnostními podmínkami
- Varování před rizikem kolize s vozidlem MHD
- Varování před prudkým brzděním
Bližší popis funkce jednotlivých vybraných aplikací je pak předmětem samostatných hesel.
Aplikovatelnost
Kooperativní systémy jsou považovány za budoucnost pozemní dopravy, která přinese jak snížení nehodovosti a následků nehod, tak zvýšení komfortu řidičů. Ačkoli jsou C-ITS tématem odborných diskuzí již od devadesátých let dvacátého století, z počátku se veškeré výzkumy zaměřovaly především na identifikaci a návrh možných aplikací, popřípadě na jejich základní otestování v uměle vytvořeném prostředí. V poslední dekádě se testování kooperativních systémů již přesouvá do reálného provozu, a díky pokroku ve standardizaci bezdrátových telekomunikačních technologií začíná být vyjasněna i otázka volby přenosové technologie, která až do nedávna byla jedním z omezujících faktorů pro nasazování kooperativních systémů.
Projektů a aktivit zabývajících se kooperativními systémy probíhala a v současnosti probíhá celá řada. Protože se předpokládá v brzké budoucnosti rozmach aplikací kooperativních systémů, jsou často partnery těchto projektů výrobci automobilů. Příkladem jsou projekty CVIS či COOPERS a další navazující projekty včetně projektů velkých společností z prostředí řízení dopravy jako je Siemens a velkých výrobců vozidel VW, Volvo a dalších.
MD ČR se v roce 2013 připojilo k Evropskému projektu C-ROADS, jehož cílem je ověřit v praxi fungování kooperativních systémů a standardizace jejich zavádění na území Evropské unie. V rámci jeho národní odnože C-ROADS CZ probíhalo pilotní testování na dálnicích, ve městech a na železničních přejezdech. Testovanými aplikacemi C-ITS byly například varování před zhoršenými povětrnostními a dopravními podmínkami na dálnicích, preference MHD a IZS na světelně řízených křižovatkách ve městech a varování před rizikem kolize s drážním vozidlem na železničních přejezdech a mnoho dalších. Součástí pilotního provozu bylo také řešení zabezpečení systému formou infrastruktury pro vydávání veřejných a privátních klíčů pro podepisování a ověřování vyměňovaných C-ITS zpráv. V závěru pilotního testování probíhalo také přeshraniční testování s ostatními účastníky evropského projektu C-ROADS, jehož se účastnili partneři z Rakouska, Belgie, Finska, Francie, Německa, Maďarska, Itálie, Nizozemska, Slovinska, Švédska a Velké Británie.
Odkazy a souvisící normy
ETSI EN 302 665 Intelligent Transport Systems (ITS); Communications Architecture
ISO TR 17427-2 Intelligent transport systems - Cooperative ITS - Framework Overview
ISO 21217 - Intelligent transport systems -- Communications access for land mobiles (CALM) -- Architecture
Příklady na odkazy a literaturu ke kooperativním systémům:
https://www.c-roads.eu/platform.html
DRIVE C2X brochure, dostupný z
http://www.drive-c2x.eu/tl_files/publications/DRIVE_C2X_brochure_web.pdf
Umístění v hierarchii témat
Nadskupina: Inteligentní dopravní systém, informační a řídicí systém
Podskupina: C-ITS služby (aplikace), C-ITS stanice, ITS-G5, LTE-V
