CEN TS 15213-3 - Pokrádežové systémy pro navracení odcizených vozidel – Část 3: Rozhraní a systémové požadavky v systému spojení krátkého dosahu
Aplikační oblast: Pokrádežové systémy pro navrácení odcizených vozidel
Rok vydání normy a počet stran: Vydána 2007, 38 stran
Zavedení normy do ČSN: endorsement
Rok zpracování extraktu: 2008
Skupina témat: ATSVR (Pokrádežové systémy pro navracení odcizených vozidel)
Téma normy: Rozhraní a systémové požadavky v systému spojení krátkého dosahu
Charakteristika tématu: Definice rozhraní pro systémy krátkého dosahu (do 100m)
Podmínky pro zařazení zařízení do systémů krátkého dosahu
Definice rolí jednotlivých součástí systému (OBU, detekční zařízení, komunikační jednotka)
Specifikace funkcí
Rozhraní mezi OBU a detekčním zařízením, definice statického diagramu detekce
Úvod
Tato předběžná norma byla zpracována pro definování architektury v rámci pokynů CEN/TC 278, kterou lze dosáhnout určité úrovně interoperability mezi jednotlivými komponentami pokrádežových systémů, Operačními centry pokrádežových systémů (SOC) a Orgány činnými v trestním a přestupkovém řízení (LEA), jak na národní, tak i mezinárodní úrovni.
Tato norma stanovuje charakteristiky požadované pro provoz pokrádežového systému pro navracení vozidel (ATSVR) s konceptem komunikace na krátkou vzdálenost (při vzdálenosti na dohled od odcizeného vozidla). Tento systém umožňuje orgánům činným v trestním řízení (LEA) provést některé kroky vůči odcizenému vozidlu – např. jeho identifikaci nebo ovlivnění jeho provozu. Na jejím vytvoření se pracovně podíleli zástupci a odborníci z řad policie, Evropské asociace pojišťoven (CEA), výrobců vozidel, asociací přepravců, asociací půjčoven vozidel a poskytovatelů systému a služeb ATSVR v úzké spolupráci s Europolem a Pracovní skupinou pro spolupráci evropských policejních sborů (EPCWG).
Komunikace na krátkou vzdálenost je charakteristická nedostatkem času na přenos dat z palubního zařízení OBE na detekční zařízení z důvodu rychlosti projíždějících vozidel. Proto tato specifikace stanovuje délku dat na absolutní minimum. Datové prvky, jako je čas, datum nebo souřadnice polohy vozidla se nemusí přenášet, protože samotný pokrádežový systém (ATSVR) sestává z různých prvků, které komunikují a interagují na mnoha rozhraních podle normalizovaných postupů a protokolů, aby usnadnily navrácení odcizených vozidel. Tyto procesy mohou zahrnovat i lidského operátora. Mezi prvky systému patří palubní zařízení OBE instalované ve vozidle, nespecifikovaný počet detekčních zařízení a jedno nebo více Operačních center pokrádežového systému (SOC).
Některá rozhraní nespadají do předmětu této specifikace, jako např. rozhraní komunikace do a ze snímačů, ovladačů a lidských operátorů, a dále zdroje určující polohu jakým je např. GPS nebo interní rozhraní orgánu LEA.
Užití
Tato předběžná norma je určena zejména pro provozovatele a projektanty pokrádežových systémů (zejména lokalizačních, detekčních a identifikačních typů), provozovatelům SOC, ale i pracovníkům státní správy (především z řad PČR, městské policie, ale i MV ČR event. MDČR).
1. Předmět normy
Tato technická specifikace popisuje strukturu, pořadí bitů, číslování a kódování prvků zpráv, které jsou typicky přenášeny jako data. Důraz je především kladen na srozumitelnost a jednoznačnost zpráv, nikoliv jejich stručnost. Specifikace se nezabývá požadavky nebo kroky různých lidských prvků pokrádežového systému, ale má za cíl identifikovat interakce a rozhraní, která existují mezi zařízením a lidskými operátory v rámci systému.
2. Souvisící normy
Tato specifikace se technologicky opírá o normy vyhrazeného spojení krátkého dosahu (DSRC) – EN 13372, EN 12253, EN 12795 a EN 12834. Dále souvisí s normou architektury automatické identifikace vozidel (EN ISO 14814) a s normou aplikačního rozhraní elektronického výběru poplatků (EN ISO 14906).
3. Termíny a definice
Pro účely této normy platí termíny a definice uvedené v CEN/TS 15213-1 a tyto:
3.5 struktura datového prvku (data element structure) jedná se o konstrukci obsahující několik datových prvků v předepsaném formátu
3.6 identifikační funkce (identification function) komunikační funkce krátkého dosahu mohou být také používány pro jednoznačnou identifikaci vozidel, jestliže země původu vozidla nebo jeho registrace to dovoluje
3.9 základní identifikátor (primitive identifier) identifikace jako samostatná identita nepožaduje žádné kvalifikátory, jakými jsou datum platnosti atd.; všechny prvky identifikátorů mají být postaveny z více než jednoho základního identifikátoru
3.10 funkce dálkové aktivace (remote activation) nastavení elektronického spínače (několika bitů informace ve vozidle) může být použito při komunikaci do vozidla v případě, že toto vozidlo je odcizeno; tato funkce se nazývá funkce dálkové aktivace
3.11 funkce dálkového znehybnění (remote degradation) tato funkce obstarává možnost dálkového znehybnění vozidla využitím funkce dlouhého nebo krátkého dosahu; komunikace krátkého dosahu může být preferována z důvodu požadavku některých zemí na přímou viditelnost vozidla autorizovanou osobou při nastavování této funkce
3.13 pokrádežový systém pro navracení vozidel se systémem na krátkou vzdálenost (short range after theft system for vehicle recovery (ATSVR SR)) pokrádežový systém pro navracení odcizených vozidel se spojením krátkého dosahu na vzdálenost viditelnosti odcizeného vozidla, nebo obdobnou, který zahrnuje různé části komunikující a vzájemně působící ve shodě se standardními postupy a přenosovými protokoly za účelem usnadnění navrácení odcizeného vozidla
3.14 detekce konzultací systému krátkého dosahu (SR detection by consulting) detekční zařízení elektronicky konzultuje projíždějící vozidla; tato funkce se nazývá funkce detekce konzultací systému krátkého dosahu
3.15 detekce signalizací systému krátkého dosahu SR (detection by signalling) odcizené vozidlo samo signalizuje (po bezdrátovém procesu aktivace), že je odcizeno; tato funkce se nazývá funkce detekce signalizací systému krátkého dosahu
4. Symboly a zkratky
Tato kapitola uvádí 31 zkratek, mezi nejvýznamnější patří:
4.3 ATSVR -pokrádežový systém pro navracení odcizených vozidel
4.13 DE -detekční zařízení
4.15 DSRC- vyhrazené spojení krátkého dosahu
4.18 EFC -elektronický výběr poplatků
4.21 LEA- orgán činný v trestním řízení
4.22 LR -systém dlouhého dosahu
4.24 OBE- palubní zařízení
4.29 SOC- operační centrum pokrádežového systému
5 Požadavky na operace krátkého dosahu
5.1 Podrobné diagramy a sekvenční diagramy architektury
Tento článek popisuje architekturu systému ATSVR krátkého dosahu (článek 5.1), a to dvou druhů detekce, detekci konzultací a detekci signalizací. Každá je znázorněna ve své statické podobě diagramem a ve své dynamické podobě sekvenčním diagramem. Pro bližší představu je uveden statický diagram detekce konzultací, jak jej ilustruje obrázek 1 doprovázený příslušnými vysvětlivkami.
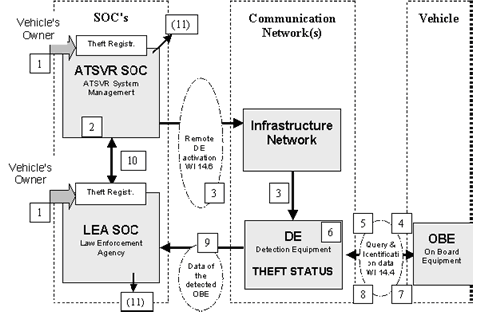
Vysvětlivky:
Odcizení se musí nahlásit orgánu LEA skrze operační centrum pokrádežového systému SOC
Informace „nahlášeno jako odcizené“ je operačním centrem uložena.
Poté, co bylo nahlášeno odcizení, je aktivováno detekční zařízení (aktualizací jeho dat), a to přímo orgánem LEA před zadáním informace do systému, a nebo pomocí síť dlouhého dosahu.
Detekční zařízení (DE) se dotazuje palubních zařízení projíždějících vozidel („konzultace“).
OBE odpovídá zasláním identifikačního čísla vozidla (VIN) a statusem odcizení vozidla (nebo zašifrovanou informací, ze které lze odvodit status odcizení a VIN).
DE porovná data získaná z OBE s datovým souborem odcizených vozidel a stanoví, zda-li je vozidlo nahlášeno jako odcizené.
Pokud DE stanovilo, že status vozidla byl aktualizován, zašle příslušná data do OBE.
Potvrzení, že OBE bylo aktualizováno, je nahlášeno a nahráno do DE.
Data detekovaného vozidla spolu se statutem jsou zaslána orgánu LEA.
Tato informace je následně směrována operačnímu centru SOC pro aktualizaci jejich dat.
Na základě těchto „technických“ požadavků mohou orgán LEA nebo operační centrum SOC provést příslušné kroky.
5.2 Funkce identifikace
Tento článek popisuje funkci identifikace, která umožňuje jednoznačnou identifikaci vozidla registrovaného jako odcizené. To lze provést čtením dat vozidla, např. VIN, SPZ, status odcizení, model a barva vozidla. Tato funkce se typicky využije autorizovanou osobou při použití ručního skeneru.
5.3 Funkce aktivace na dálku
Tento článek popisuje funkci aktivace na dálku. Tato funkce je částí detekce signalizací a detekce konzultací. Funkce aktivace přepne status odcizení vozidla na ON. Pro koncept komunikace na krátkou vzdálenost je vozidlo detekováno detekcí konzultací – DE porovná přijatá data s daty ve své vlastní databázi registrovaných odcizených vozidel a stanoví, zda-li je vozidlo nahlášeno jako odcizené. Status odcizení vozidla se může změnit z OFF na ON poté, co DE zašle signál do palubního zařízení OBE.
5.4 Funkce deaktivace na dálku
Tento článek popisuje funkci deaktivace na dálku. Po navrácení vozidla se musí status odcizení znovu nastavit na OFF. Tato funkce musí být zabezpečena šifrovacím mechanismem a pouze specificky akreditované osoby tak mohou učinit.
5.5 Funkce znehybnění na dálku (nepovinná)
Tento článek popisuje funkci znehybnění na dálku, která poskytuje možnost na dálku ovlivnit funkční charakteristiky vozidla; zde se preferuje koncept komunikace na krátkou vzdálenost, neboť některé země vyžadují, aby se odcizené vozidlo pohybovalo na dohled od autorizované osoby, která tuto funkci spustí.
5.6 Funkce indikace odcizení
Tento článek popisuje funkci indikace odcizení, které je přenosem varování nebo alarmu z OBE do DE, že dané vozidlo by mohlo být odcizené. Jedním z bitů statusu odcizení může indikovat, že samotné vozidlo detekovalo možnost statusu odcizení.
5.7 Sekvence interakcí
Tento článek popisuje formy služeb pokrádežového systému a odvolává se na přílohu B, která uvádí příslušné příklady.
6 Provozní charakteristiky
Kapitola 6 popisuje provozní charakteristiky detekčního zařízení DE a palubního zařízení OBE. V článku 6.1 uvádí společné charakteristiky obou zařízení, jakými jsou definice zpráv vyměňovaných mezi DE a OBE, schopnost vyhnutí se kolizi při komunikaci DE s více OBE nebo narušení komunikace s více OBE signalizací jednoho OBE, že vozidlo je odcizené, a dále požadavky na frekvenci, šířku pásma, modulaci a jiné charakteristiky rádiového vysílání. Pro ilustraci je uvedena část tabulky 8.
Parametry | Značka | Rychlost 80 km/h | Rychlost 200 km/h | Velikost dat |
|
| Hodnota | Hodnota |
|
Počet vozidel v eliptickém přenosovém oblouku DE o délce 50 m (dálnice o 2x3 jízdních pruzích) Při rychlosti 80 km/h: nejvyšší hustota dopravy, vozidla jezdí v rozestupech 1 s Při rychlosti 200 km/h: nejvyšší hustota dopravy, vozidla jezdí v rozestupech 1 s | V | 12 | 3 | - |
Odhadnutý počet přenášených bytů ve zprávě rychlé identifikace: Náhodný počet, ID pro šifrování, VIN, status OBE, 2x autentizační byty, aktualizace statusu OBE | B | 128 | 128 | byty |
V článku 6.2 jsou definovány charakteristiky palubního zařízení OBE, jakými jsou přenosová rychlost, baterie, ukládání dat, stálá a přepisovatelná kapacita pro uložení dat a spojení do interní sběrnice vozidla.
Článek 6.3 popisuje charakteristiky detekčního zařízení, jakými jsou rozhraní s komunikační sítí, interní databanka a dále typy detekčního zařízení, které může být stacionární nebo mobilní.
Článek 6.4 definuje komunikační vzdálenost mezi OBE a DE ve třech případech, stacionární DE a OBE, mobilní DE a OBE a ruční DE a OBE.
Článek 6.5 se zabývá omezení rychlosti vozidel, které je 250km/h.
Článek 6.6 popisuje minimální počet aktivací bez připojení k baterii vozidla a článek 6.7 diskriminaci mezi vozidly, kdy je detekčním zařízením požadováno, aby OBE odpověděla v diskriminačním módu.
7 Datové prvky
Kapitola 7 uvádí v článku 7.1 požadavky na datové prvky, šifrování, referenční seznamy odcizených vozidel a signalizaci. Článek 7.2 obsahuje požadavky na datové prvky společné DE a OBE.
Příloha A (informativní) Legislativní otázky
Tato příloha uvádí požadavky na zařízení, která musí mít schválení typu a splňovat požadavky
evropské směrnice EMC atd. Dále uvádí seznam směrnic a předpisů na radiové přenosy.
Příloha B (informativní) Příklady stavových diagramů procesů pokrádežových systémů ATSVR
Tato příloha uvádí na sedmi stranách příklad procesů pokrádežových systémů ATSVR pomocí stavových diagramů, pro představu je uvedena první část obrázku B.1.